- ROBOTICS 21XX
- ROBOTICS 21XX is the online show of manufacturers of industrial robots

- Technologies for the new generation information infrastructures based on Computer Vision, Robotics and Artificial Intelligence

- Robotics and neuroscience research implementing models of cognition in robots of humanoid shape


- Embodied life-like artificial systems, humanoids, biological artificial systems, man-machine interaction, imitation learning


- Foster intelligence in all its facets by promoting excellence in basic research, education, and society at large.


- Geminoid-DK is home to a geminoid, a human-like robot which is intended to advance android science & philosophy


- Humanoid Robot "LOLA", Biped Robot JOHNNIE, CVT, Valve Train Dynamics, Cyberwalk and Cybercarpet...

- The humanoid robot developed as part of the EU project RobotCub and subsequently adopted by more than 20 laboratories worldwide

- Control Engineering's main goal is to investigate the applicability of modern systems and control methods to practical situations

- mechatronic design of robotic and automation systems, fault tolerance to mechanical systems, fault-tolerant design...


- Developing the principles, techniques, and technologies for personal robots

- Micro-motion manipulators, robotic measurement systems, mobile robotics and the modelling of insects through robotics.


- Our Research is based on the interdisciplinary design, computer-aided optimisation and simulation and complex mechatronic systems


- The main focus is on the study of humanoid robots and articulated robotic hands.
- Our research focuses on the role of sensing and mechanical design in motor control, in both robots and humans.


- We apply artificial intelligence methods to various types of real robots: mobile robots, manipulating robots, and humanoid robots


- Our research interests are in the area of Robot Locomotion and Manipulation, Kinematics and Mechanisms, and Autonomous Systems.


- Our mission is to understand the science, engineering and social role of robotics and embedded intelligence


- doing research on all types of autonomous mobile robots, including intelligent driving and walking robots, AUVs, and UAVs


- Developing science, technology, and human resources at the interface between robotics, biological systems, and medicine.


- Systems that perceive and interact with humans in real time using natural communication channels

- The CIRG - Cybernetic intelligence is the study of intelligence and its application.

- strives to realize robots and autonomous systems that are effective collaborators for pursuing human endeavors


- TnT is the reigning German champion in robot soccer challenge 2vs2, A & B + soccer world champion in 2vs2 Version B competition

- Robots using adhesion technology, haptics, seabed underwater robotics, scansorial, climbing and maneuvering robots
- The Computational Learning & Motor Control Lab
Research in the areas of neural computation for sensorimotor control and learning.

- Our mission is to develop science, technology, & human resources at the interface between robotics and biological movement systems

- We build machines which exploit their natural dynamics to achieve extraordinary agility and efficiency


- RoboThespian is a life sized humanoid robot designed for human interaction in a public environment


- SRL is dedicated in research and development in making social robots ubiquitous parts of our day to day lives.


- Robotics and Intelligent Systems group focus on robotics, electronics and machine learning.


- Biomimetic autonomous underwater vehicles, lobster robots, biomimetic control, actuator & sensor architecture.

- The Robot Autonomy and Interactive Learning research group focuses on the development of interactive robotic and software systems


- Autonomous service & social robots, human-robot interaction, cognitive architectures, neurorobotic & motor neuroprosthetic systems
- Process Control, Signal Processing, Biomedical Engineering, and Mechatronics and Robotics


- Our objective is to research into the foundations, representations and applications of intelligent systems


- We're interested in robotic systems that manipulate remote environments. A primary focus of our work is medical telerobotics


- LRP studies experimental platforms include sensor networks, mobile manipulators, and integrated bimanual humanoids.


human - robot - interaction
Laboratory
- Our main research interest in AI is understanding how we can best create complete intelligent agents.

- Autonomous & assistive robotics, space flight life support systems, arctic navigation, surveying, perception, reasoning

- IRIDIA is deeply involved in theoretical and applied research in computational intelligence.


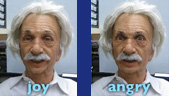
- The Robotic head project is intended to explore the human expressions & facial emotions

- Reserved for
THE UNIVERSITY OF TEXAS AT ARLINGTON

- known for their work in artificial cognition, computer vision, neural networks and machine learning, and human-robot interaction.

- Artificial Vision, Intelligent Systems, Sensor Data Fusion, Pattern Recognition


- We design next generation soft wearable robots for enhancing or restoring mobility of healthy and physically disabled individuals


- RoboLab conducts research in Autonomous Robots, Social Robotics and Computer Vision

- We work on the computational aspects of movement control, sensorimotor coordination, and learning in animals and in robots.


- Our pupose is to develop a high-speed and high-performance robot system beyond human.



















