Photoneo

Videos
Loading the player ...
- Offer Profile
- Photoneo is a leading provider of robotic vision and intelligence. Based on a patented 3D technology, Photoneo developed the world’s highest-resolution and highest-accuracy 3D camera, thus unlocking the full potential of powerful, reliable, and fast machine learning and also reducing the training and deployment time.
By bringing intelligent robots into the field, Photoneo helps companies mainly in the automotive, logistics, e-commerce, food, and medical industries to improve the performance and efficiency of their manufacturing, fulfillment, and assembly processes.
Product Portfolio
Eyes for robots worldwide

-
Parallel Structured Light™ - the future of industrial machine vision
Photoneo’s unique patented technology provides high quality and high resolution 3D data even for dynamic scenes. While ToF or Active Stereo systems provide real-time stream of data, the accuracy and resolution is limited. Sequential Structured Light systems provide high quality data, but at low FPS and only when the scene is completely static.
Automated Warehouse
AI powered material handling available for everybody
Automation of processes is becoming more popular within logistics and material handling industries. As the amount of transferred objects grows there is a continuously increasing need for high efficiency, reduced cost, and of course reliability.
At Photoneo we utilize our vast knowledge from the area of vision-guided robotics and production automation and bring you new ways and approaches to how you can look at your warehouse. Utilizing the latest technologies, artificial intelligence and precise 3D vision all you need is under one roof.
Embrace the new levels of efficiency and reduce the costs for your final customers. Our track record and global presence speak clearly in our favor - experience AI robotics that works.
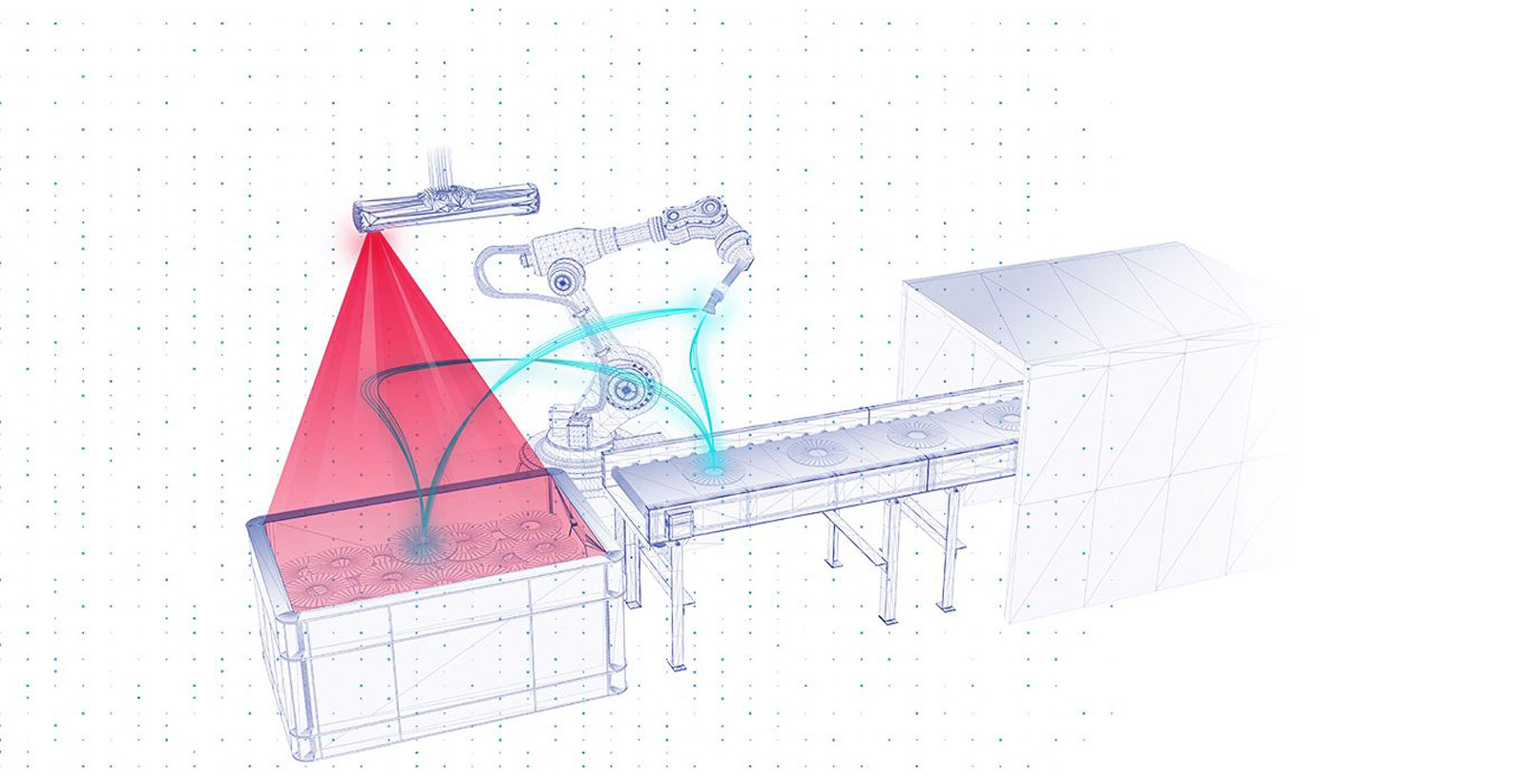
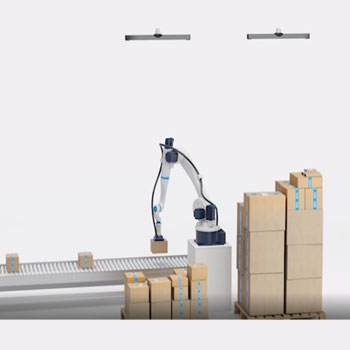
Depalletization
Robots unloading pallets - the next revolution in logistics
The depalletization solution can be fully automatic or semi-automatic. It all starts with a pallet loaded with boxes being placed inside of the range of the robot. This can be done either manually or automatically, depending on the features of the depalletization line. The 3D vision device (PhoXi 3D Scanner) then performs a scan of the pallet and transfers the scan into a 3D texture data set. The advantage of this is that this way the data set is not influenced by light conditions and it can be used for a flawless recreation of the boxes shapes.Key benefits
- UNIVERSAL DEPALLETIZATION
Boxes do not have to be stacked in a pattern and you can use any type of pallet - WORKS OUT OF THE BOX
Algorithm tested & recognizes more than 5000 types of boxes. - SPEED OF BOX TRANSFER
We can effectively depalletize the entire pallet of approximately 1000 boxes in 1 hour - NO HUMAN ERROR OR FATIGUE
Robots are able to work 24/7/365 without tiring and need of human interaction - NO BACK PAIN FROM LIFTING HEAVY OBJECTS
With proper robot and gripper you can pick up to 50 kg - REDUCTION OF OPERATIONAL COSTS
With this smart automation you do not need to pay monthly expenses connected to workers. All you do is keep the boxes coming and robot does the rest - CONSISTENCY
We guarantee more than 99.7 % pick rate achieved over the implementation. The remaining small 0.3% are diminished over time thanks to the machine learning algorithm that recognizes uncharacteristic boxes. - KNOWLEDGE HUNGRY
The most intelligent depalletization equipped with algorithm that is able to recognize new boxes.
AI Inside
- Type of pallet does not matter, we can work with any
- Algorithm worked with more than 5000 types of boxes, and it remembers them all
- No patterns - more fun! Do not stack your boxes we can work with them
- UNIVERSAL DEPALLETIZATION
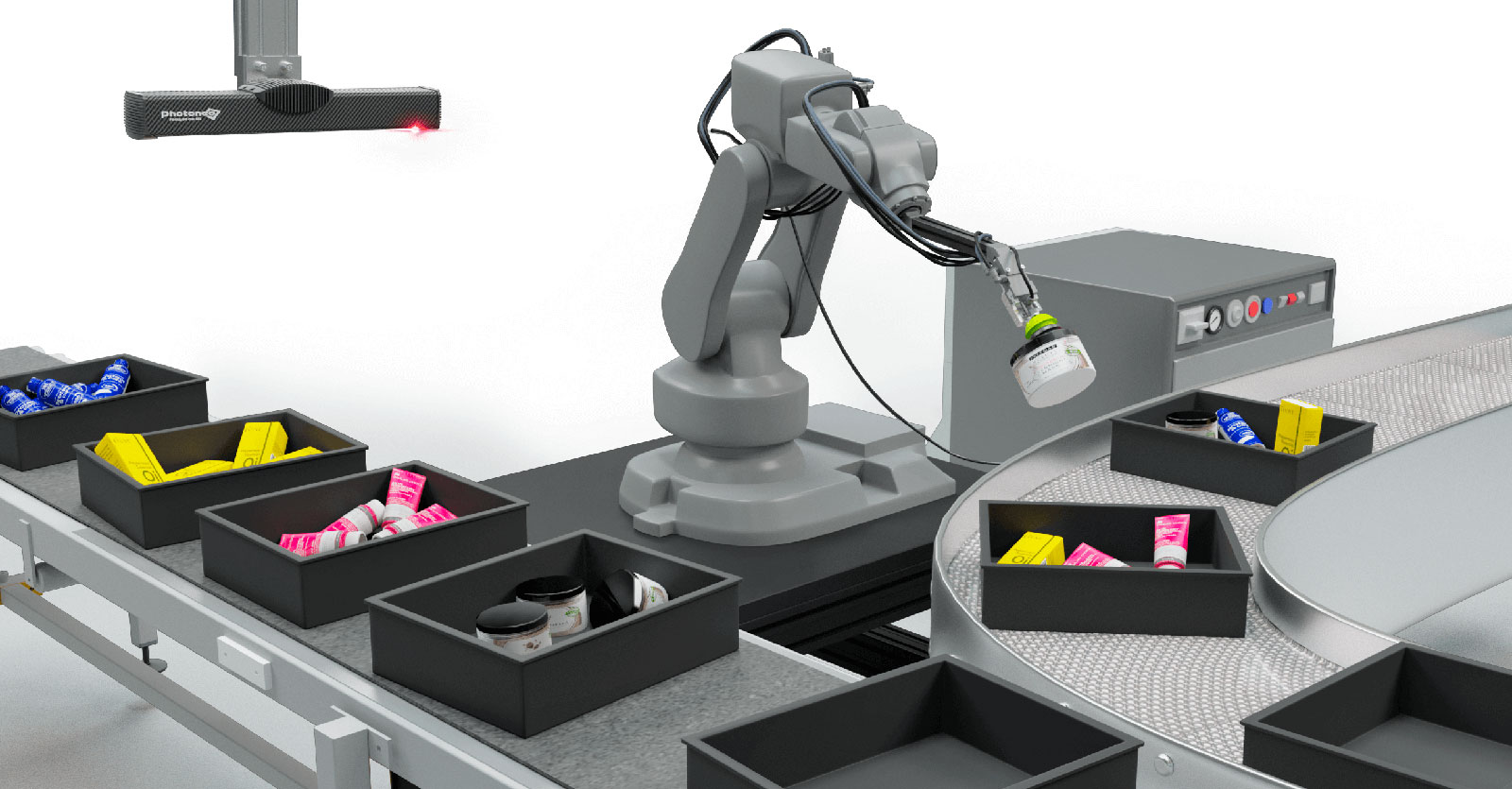
Singulation and sorting system
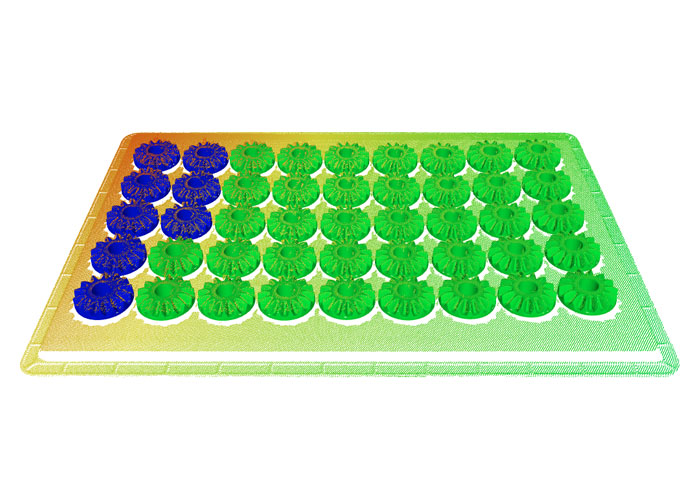
- Picking of solid objects with deformed surfaces that change under the slightest pressure was the next challenge. We taught our AI algorithms to recognize obstructions, deformations, and challenging picking paths. This way we are able to send a clear message to the robot which object is the most suitable to be picked. The result was remarkable - the ability to reach picking cycle times of less than 1.3 seconds with more than 2500 objects/hour picked. All done with precise PhoXi 3D Scanner & localization as eyes and AI algorithms as brains standing behind each singulation solution.
Smart Factory

Teach your robots to recognize and handle objects with ease
See our existing solutions and uplift your productivityReady for future?
Our passion is to deliver sophisticated automatization to customers all around the world. We do it by the implementation of vision-guided robotics and Artificial intelligence alghorithms.
This way empowers robots to be capable of end to end production without limits thus boosting the total efficiency of each automation solution, directly influencing the throughput and reducing the final price of products.
We help your production to adapt to the changing requirements and handle flexibility the numerous amounts of changing components, materials, and shapes that are used in the production of various products.
Integrate smart automation with our advanced visualization, monitoring, statistics, and artificial intelligence tools that continuously move the status quo further. Utilize your workers more effectively and automate the processes that are repetitive, dangerous, and boring.
Bin Picking
Smart manufacturing made exactly for you
Robotic manufacturing lines are built for transforming components and material to products and goods. While these systems are super-efficient on output it is still very expensive to prepare material on the input. There are several options.It is either operator placing a metal sheet on static fixtures then feeding machines that can handle one type of material or paying a supplier for fulfilling stacking patterns. This is where the benchmark of vision-guided robotics was born.
It is either operator placing a metal sheet on static fixtures then feeding machines that can handle one type of material or paying a supplier for fulfilling stacking patterns. This is where the benchmark of vision-guided robotics was born.
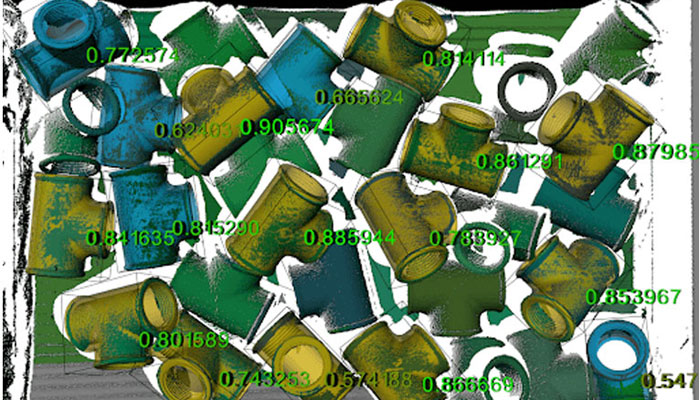
Bin Picking system is capable to process objects from a variety of materials that are randomly distributed. It is a system capable to process material randomly distributed in unorganized bins and feed it into the manufacturing production line. All done with a precise 3D vision system able to detect various types of objects and robotic intelligence systems, able to guide robots for safe object extraction.Why Bin Picking with Photoneo
-
Supreme 3D vision system
PhoXi 3D Scanner family with a wide variety of scanning volumes and track record of being used in the harshest industrial environments. -
Powerful localization algorithms
CAD-based approach tested and approved by automotive customers with high demands for robustness and accuracy. -
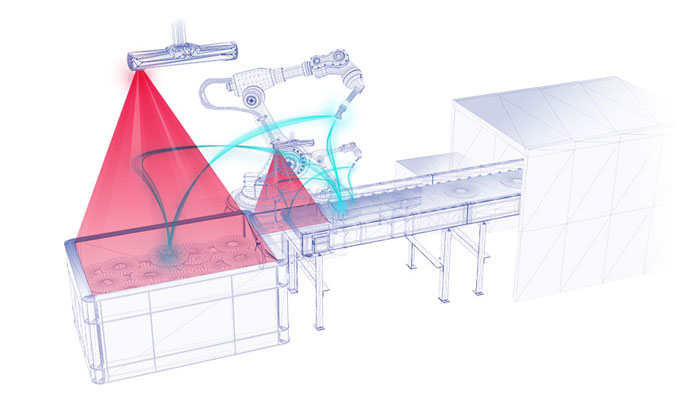
Full path planning and collision avoidance
Unique robot control with a rapid calculation of movement trajectories, whilst maintaining the highest safety standards. -
Robot agnostic
Database of hundreds of robotic models from leading robotic manufacturers.
The investment that returns fast
According to Eurostat, the average labor cost in European Area is 30.6 EUR per hour. Considering a 24/7 operation of the machine loading which requires 4 full-time employees, this setup could reach up to 350 000 EUR.
The same value of an investment, which would return within a one year period can bring the automation of the entire system.- 99.9% success rate
- 5 second cycle time
- 24/7(365 uptime
-
Supreme 3D vision system

Packaging
- Optimizing production processes is crucial for successful order fulfillment. Packaging belongs to one of these processes. Implement smart automation in the form of vision-guided robotics into your production and reduce the time and costs necessary to prepare your products for shipping to final customers.
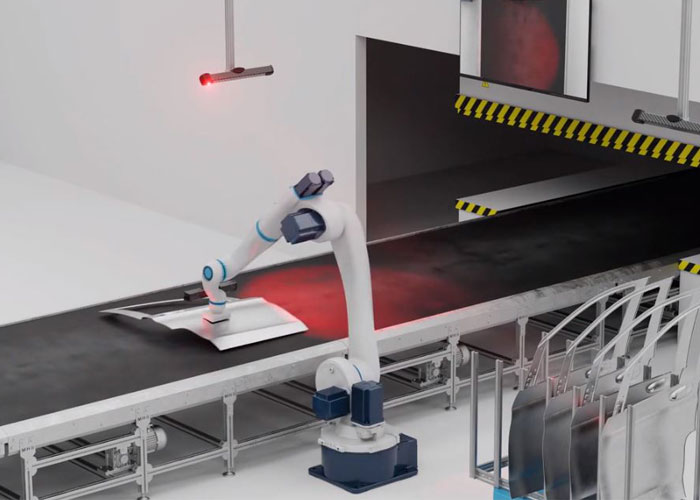
Machine Loading
- Increase the speed of production and protect your workforce from injuries. Adopt the latest machine vision guided approach tasked to solve the loading and unloading of objects into your material processing stations. Equipped with high-grade industrial vision, no object is too small or too large - allow the robot to see and become part of the entire production process. Agile and precise machine loading that is automatic helps you in increasing of throughput and tackles the delays in production.

Automated Tire handling
- Automated handling of rubber objects focuses on the post-production stage of the tire vulcanization. After the tires leave the press and leave the curing process they need to be effectively handled and put on the transportation pallets. Using vision-guided robotics and advanced localization techniques it is no longer required to handle the heavy objects with human force. Utilize the power of robotics with eyes and handle your post-production phase efficiently.
INTEGRATOR ZONE
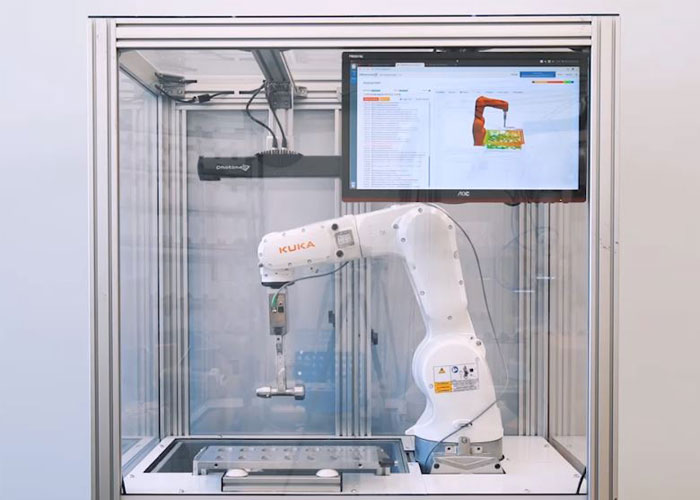
Bin Picking Studio
The most versatile robotic intelligence software
Below you can find how our bin picking solutions work: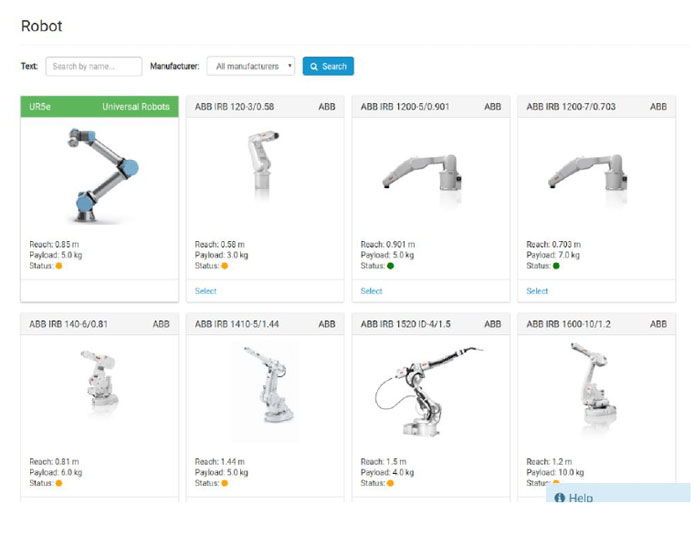
Select the robot
- For you and your projects, we have developed the largest database of robots. We are supporting great amount of robot models from various brands. And if you have a robot that is not in our list - get in touch and we will gladly provide assistance and integrate it into our Bin Picking Studio.
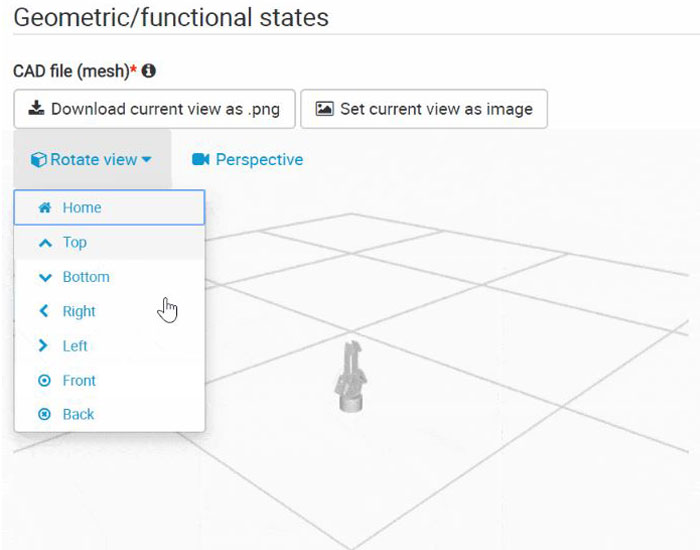
Upload the gripper
- Upload the CAD model of your gripping tool. The model of the gripper is used for tool point configuration in the virtual environment.
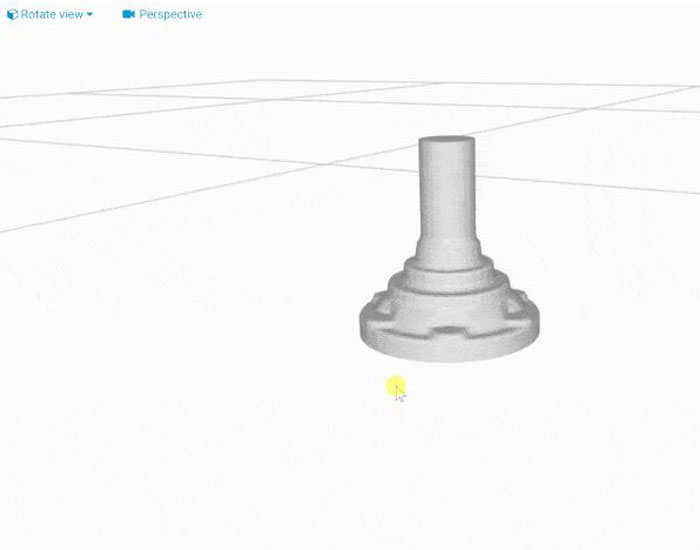
Upload your object
- All you need to start planning your bin-picking gripping points is a CAD model of the product you want to pick. Upload it into the Bin Picking Studio and immediately start working with it in a virtual environment.
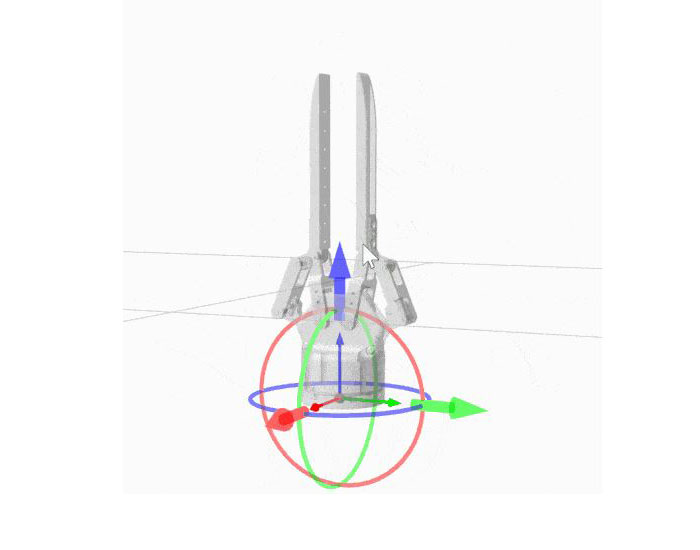
Set up gripping & tool points
- The setup of bin picking begins with the selection of points where and how will the gripper grasp the object. Bin Picking Studio offers you full support also in this task. Thanks to the simple visual process you no heavy math involved.
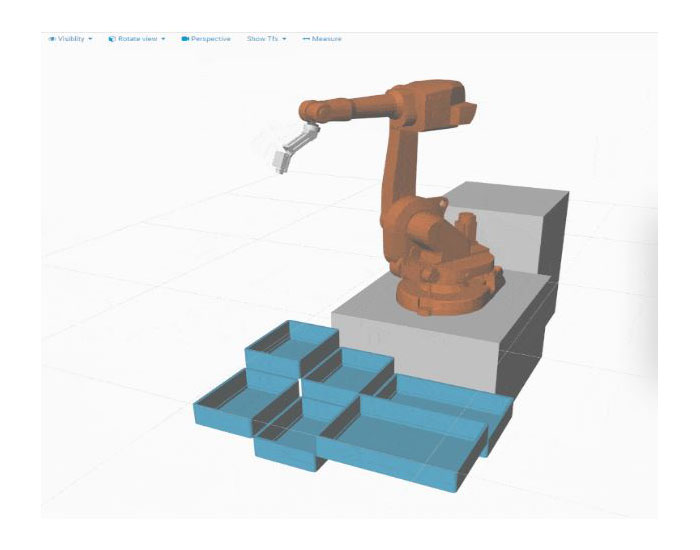
Load your environment
- In this step, we will let the Bin Picking Studio know where will the picking take place. It is done again in the easiest fashion possible - by loading a CAD model of your picking cell. Immediately after the upload, the Studio offers you a 3D visualization available for work.
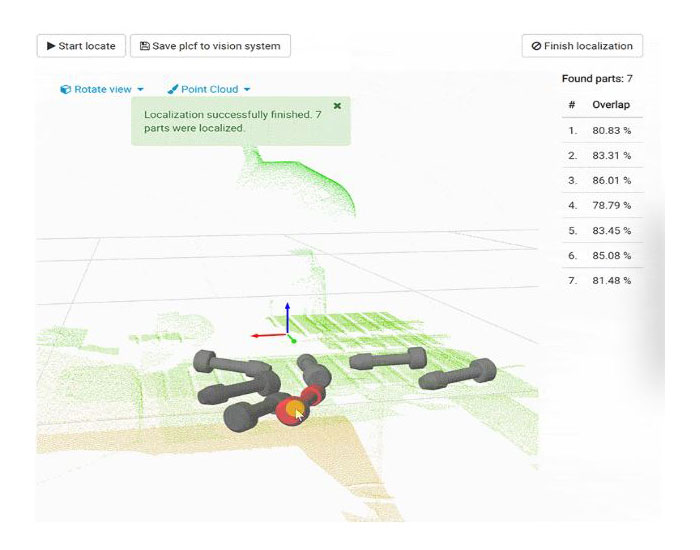
Setup your part localization
- Bin Picking Studio implements a built-in engine for setting up an object localization algorithm. The algorithm based on the CAD matching approach was developed by Photoneo to suits the use for bin-picking with a focus on speed and robustness.
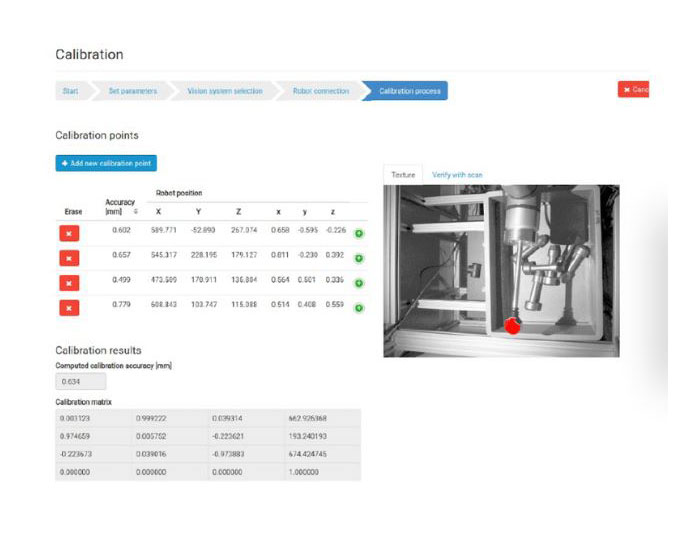
Robot to camera calibration
- Robot calibration was never easier. With Photoneo’s Bin Picking Studio you no longer need expensive and specific objects or specially prepared calibration sheets. One round object in the shape of a sphere is enough. Calibrate and synchronize your scanner and robot via the intuitive guided program. You will immediately receive visual feedback that you are able to validate and evaluate throughout the entire calibration.
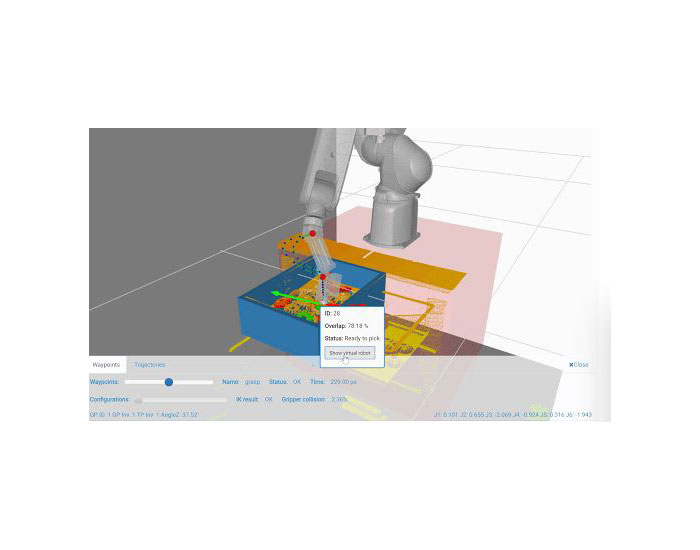
Interactive debugging
- And finally, it is time to pick. Utilize the ultimate advance debugging tools within the virtual environment. These will allow you to see how well was the solution prepared.
Complete solution for your picking projects
- Bin Picking Studio is a combination of powerful 3D vision hardware represented by our line of PhoXi scanners & intelligent software for setup of picking. What you would search from 4 different providers with us you get in one package - All in one picking solution for your projects.

Setting up the robotic intelligence in 20 minutes
Complete solution for your picking projects
Bin Picking Studio is a combination of powerful 3D vision hardware represented by our line of PhoXi scanners & intelligent software for setup of picking. What you would search from 4 different providers with us you get in one package - All in one picking solution for your projects.
MotionCam-3D Color

Real-time colorful point clouds
- Resistant to vibrations & ambient light
without producing distortion or broken acquisitions - Highest resolution and accuracy
of 3D scanning of dynamic scenes - No blurry
edges
for objects moving up to 40 m/s - Patented
technology
inside in the form of novel CMOS sensor - Ultra high-density
point cloud with a resolution of 0,9 Mpx equal to 2 Mpx in the mode for static scenes. - Industry-ready device
with IP65, PoE and thermal calibration - Computational powerhouse
provides 15 million 3D points per second - Unrivaled scanning range
from 36 cm up to 4 m
- Resistant to vibrations & ambient light
Available Data Outputs
The power of Parallel Structured Light
- Parallel Structured Light brings the state-of-the-art quality and resolution of structured light scanning into the 3D reconstruction of highly dynamic scenes. This novel patented technology uses a clever sensor design which performs the acquisition in one snapshot as opposed to the sequential scanning of a standard image sensor. This means that the Parallel Structured light method practically freezes the 3D scene in time.
PhoXi 3D Scanner

- Robust scanning performance
- Resistant to temperature changes
- Accuracy of 25- 500 um PoE & 24 V powering options
- Lightweight carbon body
- Dust & water proof
- Largest scanning volume
- Plug & Play easy setup
PhoXi 3D Scanner by Photoneo is your go-to scanner when looking for high-resolution and high-accuracy scanning of static scenes. Its structured light projection approach provides output in the form of precise point clouds for fast localization of any desired part. The robustness of the scanner ensures superior quality of scans, which makes it the best scanner for even the harshest environments. PhoXi 3D Scanner was awarded by the Vision Systems Design Innovators Awards Program for its unbeatable performance and best-in-class resolution/speed ratio. Each scanner from the PhoXi family (models XS-XL) is suitable for different applications, depending on the size of the scanned object, scanning volume, and other aspects. Equip your robot with a powerful 3D vision and allow it to see.Industrial 3D scanner for the most demanding machine vision tasks
-
Largest scanning volume
The scanning volume of the PhoXi 3D Scanner family ranges from 15 cm up to 4 meters, allowing you to scan large as well as very small objects.
Each of our five scanner models has been designed for a different scanning range to respond to your needs and cover all possible applications. -
High resolution, accuracy & level of detail
Get 3 Million 3D points in every scan and an accuracy of 25 - 500 um across the different models.
The carbon body and thermal calibration ensure minimal expansion and reliable performance under changing conditions. -
Best in class performance
Do you need to deploy your scanner in a brightly lit hall? Our advanced methods for ambient light suppression provide superior quality of scans even in demanding light conditions of up to 20 000 LUX.
Materials such as shiny or reflecting surfaces pose no challenge thanks to the sophisticated noise filtering algorithms that are in place. -
Lightweight and energy-efficient
Thanks to its low weight of less than 1.5 kg, the PhoXi 3D Scanner can be mounted directly onto the robotic arm - a very handy option if you need to scan a big bin with a smaller scanner from variable viewpoints, or to get a detailed look at the bin corners.
Together with an energy consumption of less than 35 W, it makes a perfect fit for any kind of robot whilst reducing money spent on energies and complex cells. -
Easy integration
Enjoy the quick and easy setup – just plug and play in 3 minutes! The new PoE connector requires only a single cable to provide both electric power and data connection.
If you need to power your device by 24 V, no problem – you can use the alternative powering option. Together with our advanced API and support of numerous operating systems, we made the integration easy as never before. -
Dust & water proof
Featuring protection class IP65, the PhoXi 3D Scanner is dust-tight and protected against low- pressure jets of water coming from any direction and at any angle.
M12 connectors with screw-on locks ensure a robust, industrial-grade connection. PoE & 24V powering options
You only need a single cable to get both electric power and data connection - Power over Ethernet.
Alternatively, you can power your device by 24 V. The two options ensure versatility, easy use, and strong performance even when using long cables > 30 m. -
Thermal calibration
PhoXi 3D Scanner offers the best-in-class thermal stability thanks to hardware enhancements together with the thermal calibration model.
It ensures a stable and reliable scanning performance in changing temperature conditions.
See through our eyes
Inspection of smallest parts
- The PhoXi 3D Scanner XS was designed for high-precision scanning of small objects falling within the scanning range of 161 to 205 mm. Providing high accuracy and a great level of detail, the model XS is your best choice for the inspection of objects and materials.
Recognize even the most complex objects
- Thanks to the advanced algorithms for noise filtering, PhoXi 3D Scanner has no difficulties with shiny or reflecting materials. It can be used for scanning and inspection of metal objects such as cogwheels.

Medical industry
- Do you need to scan a human body or a part of it? This is no problem with the PhoXi 3D Scanner. Its wide range of applications includes the medical industry.

Different surfaces in one single scan
- What about a complex scene containing various kinds of objects with different surfaces? No problem, you can get a point cloud of them all in one single scan.
PhoXi 3D Scanner Models

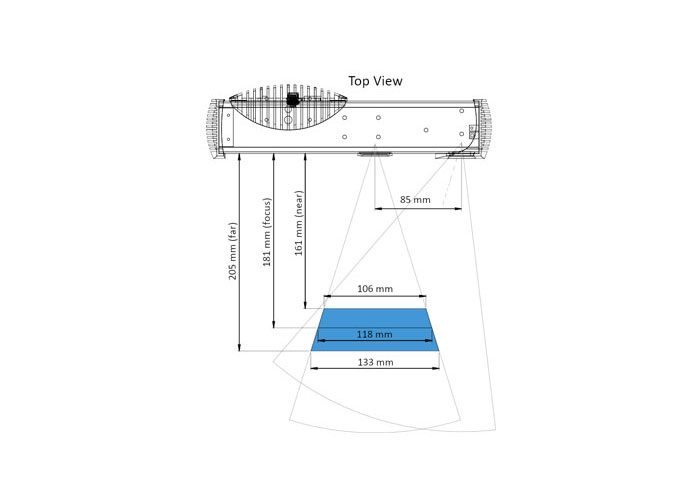
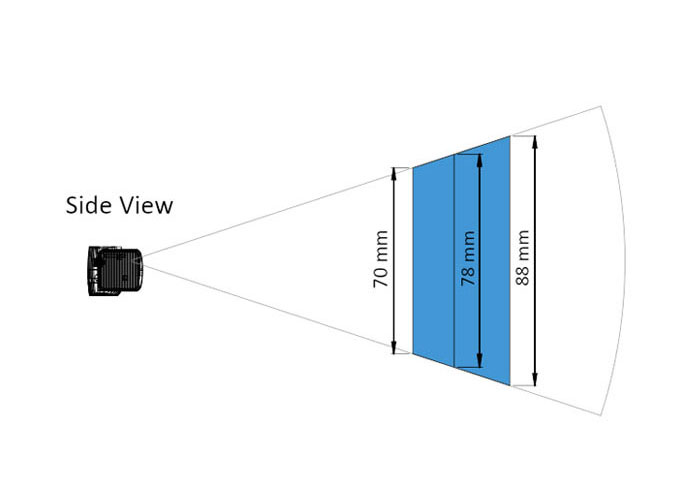
PhoXi 3D Scanner XS
- The smallest device from the PhoXi 3D Scanner family. It is perfect for scanning of ultra-small objects such as PCB’s, or connector pins. It is especially useful when looking for high level of detail.
Datasheet
Parameter Value Resolution (3D Points) Up to 3.2 M Scanning range 161 – 205 mm Optimal scanning distance 181 mm Scanning area at sweet spot 118 x 78 mm Point to point distance 0.055 mm Calibration accuracy (1 σ) 0.035 mm Temporal noise (1 σ) 0.030 mm Scanning time 250 – 2000 ms Dimensions 77 x 68 x 296 mm Baseline 85 mm Weight 900 g 3D points throughput 16 Million points per second GPU NVIDIA PascalTM Architecture GPU with 256 CUDA cores

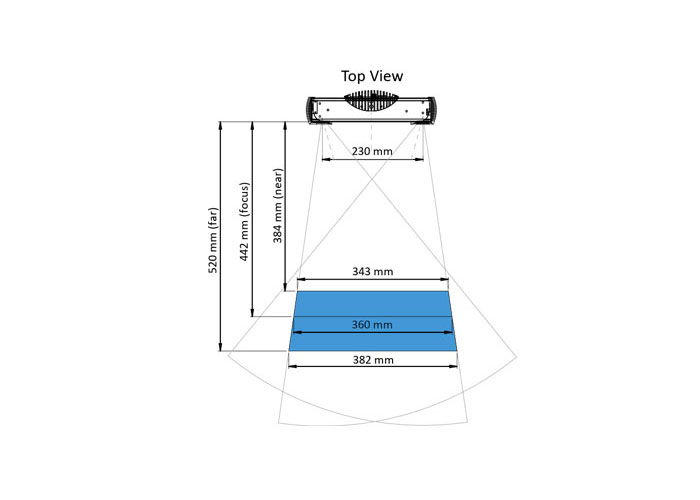
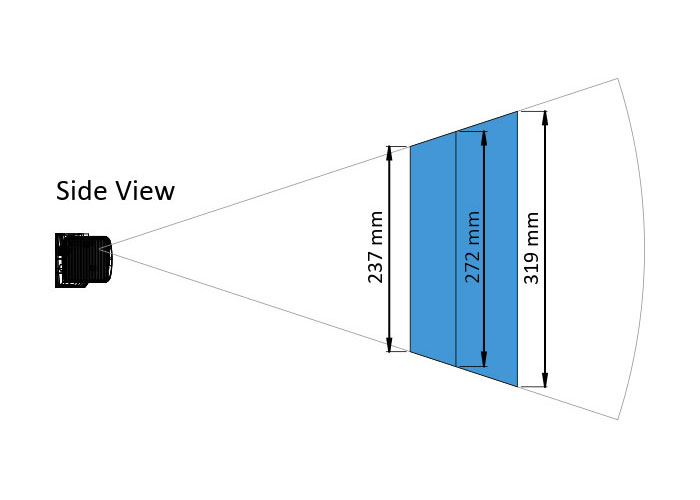
PhoXi 3D Scanner S
- Useful especially for inspection & quality check-up. The scanning range is larger than in the case of the XS version. However, the general rule of thumb says it is best used for scanning of objects that fit into one’s hand. This is the first model that can be used also for bin picking of objects from small bins.
Datasheet
Parameter Value Resolution (3D Points) Up to 3.2 M Scanning range 384 – 520 mm Optimal scanning distance 442 mm Scanning area at sweet spot 360 x 272 mm Point to point distance 0.174 mm Calibration accuracy (1 σ) 0.050 mm Temporal noise (1 σ) 0.050 mm Scanning time 250 – 2250 ms Dimensions 77 x 68 x 296 mm Baseline 230 mm Weight 900 g 3D points throughput 16 Million points per second GPU NVIDIA PascalTM Architecture GPU with 256 CUDA cores

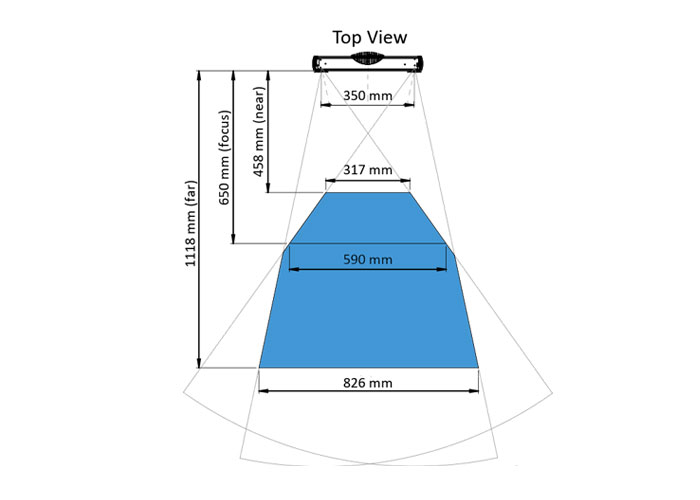
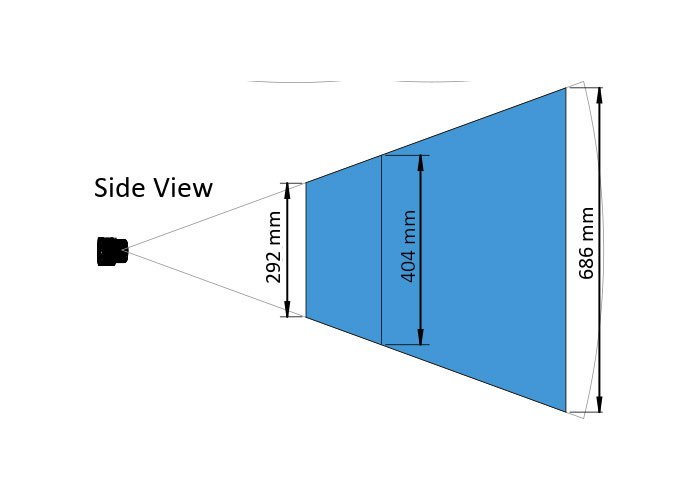
PhoXi 3D Scanner M
- It is suited for picking of objects that are the size of a soccer ball usually from bins with size of 40x60 centimeters. Another use of this device is in the inspection as well as 3D model creation. With its size and scanning range, it is optimal for being mounted on a small robot or collaborative robot.
Datasheet
Parameter Value Resolution (3D Points) Up to 3.2 M Scanning range 458 – 1118 mm Optimal scanning distance 650 mm Scanning area at sweet spot 590 x 404 mm Point to point distance 0.286 mm Calibration accuracy (1 σ) 0.100 mm Temporal noise (1 σ) 0.100 mm Scanning time 250 – 2500 ms Dimensions 77 x 68 x 416 mm Baseline 350 mm Weight 950 g 3D points throughput 16 Million points per second GPU NVIDIA PascalTM Architecture GPU with 256 CUDA cores
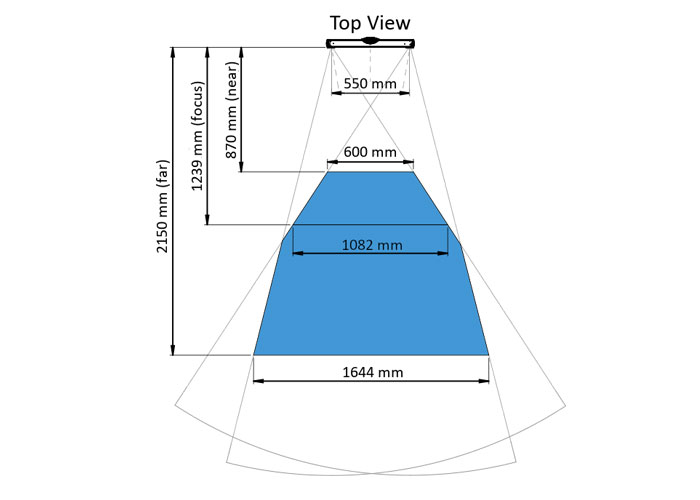
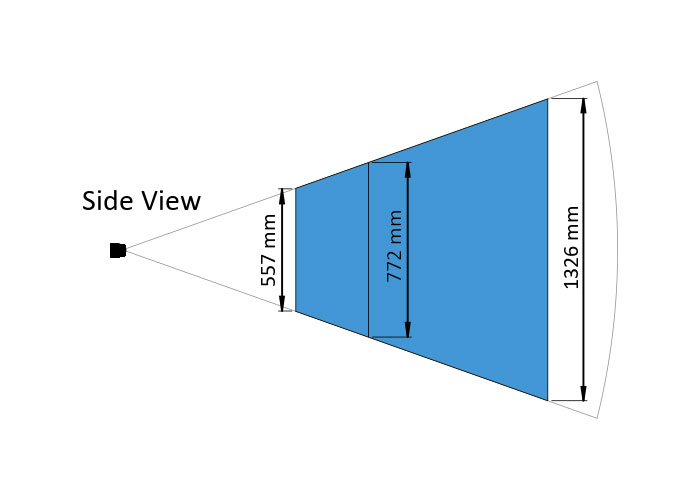
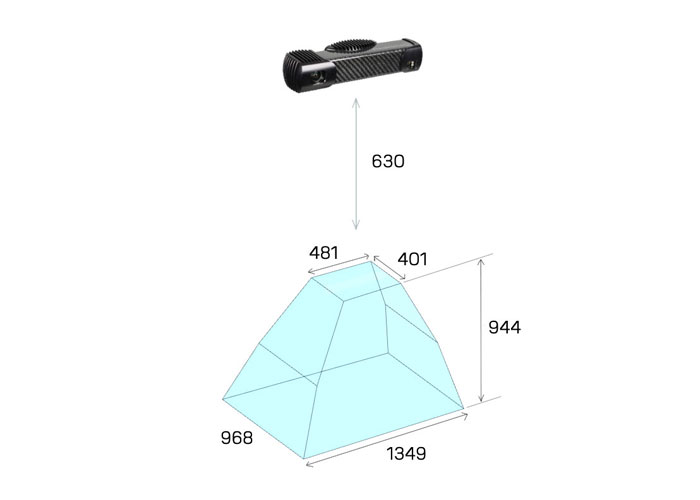
PhoXi 3D Scanner L
- Scanner with high range especially useful for scanning of objects and bins of with a size of euro pallet. It found its use in vision-guided robotics projects especially in automotive. However thanks to its versatility it was used in a variety of industrial sectors, ranging from medical, logistics, agriculture, or heavy industries.
Datasheet
Parameter Value Resolution (3D Points) Up to 3.2 M Scanning range 870 – 2150 mm Optimal scanning distance 1239 mm Scanning area at sweet spot 1082 x 772 mm Point to point distance 0.524 mm Calibration accuracy (1 σ) 0.200 mm Temporal noise (1 σ) 0.190 mm Scanning time 250 – 2750 ms Dimensions 77 x 68 x 616 mm Baseline 550 mm Weight 1100 g 3D points throughput 16 Million points per second GPU NVIDIA PascalTM Architecture GPU with 256 CUDA cores
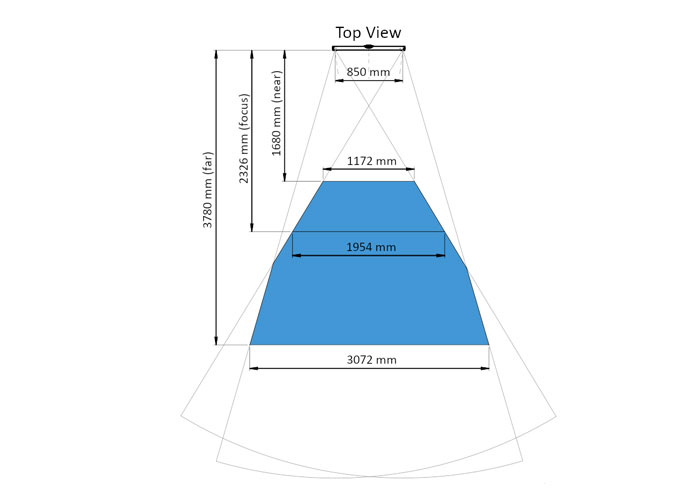
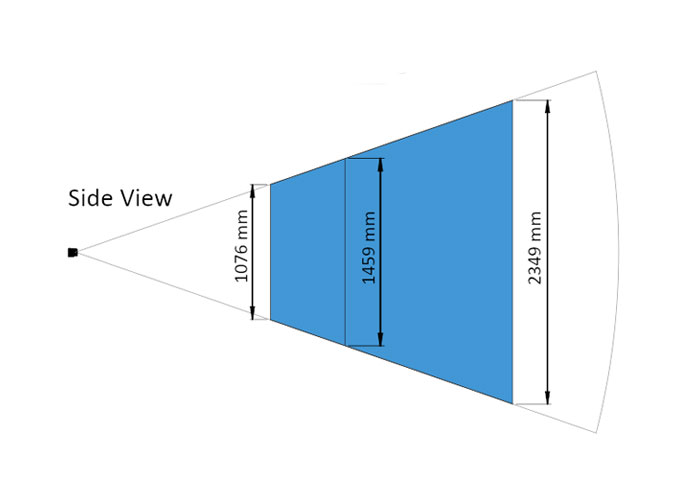
PhoXi 3D Scanner XL
- The only industrial scanner in its class with the highest scanning volume. It is especially useful when it comes to the scanning of large objects that are further away from the scanner itself whilst requiring high accuracy. A typical example is a depalletization.
Datasheet
Parameter Value Resolution (3D Points) Up to 3.2 M Scanning range 1680 - 3780 mm Optimal scanning distance 2326 mm Scanning area at sweet spot 1954 x 1459 mm Point to point distance 0.947 mm Calibration accuracy (1 σ) 0.500 mm Temporal noise (1 σ) 0.400 mm Scanning time 250 – 3000 ms Dimensions 77 x 68 x 941 mm Baseline 850 mm Weight 1200 g 3D points throughput 16 Million points per second GPU NVIDIA PascalTM Architecture GPU with 256 CUDA cores
Case studies

Dimensioning & measurement
- The logistics industry needs to keep up with the growing demand of the market. Continuous growth in orders requires modern automation solution that require high accuracy scanning of variety of objects that are dynamic. Implementing conventional vision system may prove difficult, however with the unique abilities of MotionCam-3D it is no longer problem to receive accurate measurements or even objects that are in motion.

Overhead conveyors
- Items on overhead conveyors have unpredictable non-linear movement. They are often swinging and vibrating. This is where MotionCam-3D offers unique value proposition - capturing of highly precise point clouds of even these objects that are moving unpredictably.

Hand Eye object manipulation
- Various industries are demanding a versatile and faster material handling system that does not have to stop. For MotionCam-3D the scanning in motion is no longer a problem. When mounted on robot it offers multi-perspective scanning, without motion blur, thus offering a crystal clear point clouds for further robot navigation.

Scanning of large objects
- In industry we are often encountering over-sized objects that are very challenging for scanning. Thanks to the large scanning volume of our MotionCam-3D and ability to create a “mesh” of point clouds it is possible to create precise and accurate images of even these oversized objects.
Picking of moving objects
- The amount of packages handled is constantly increasing and it is impossible to keep up with the pace whilst satisfying the throughput demands. With MotionCam-3D there is no need to stop the conveyor belt to perform actions. It offers versatility, speed and quality without compromises.
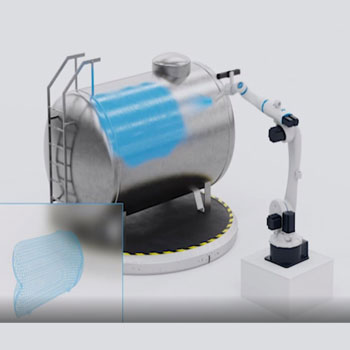
3D model creation of large objects
- Accurate manipulation of large object within acceptable cycle time is something we often observe in applications as sandblasting, painting or even welding. In order to automate these processes it is necessary to create accurate models which serve as a basis for these activities. MotionCam-3D offers a lot of flexibility and mobility due to its ability to provide continuous stream of high quality data that can be instantly meshed into a accurate 3D model.
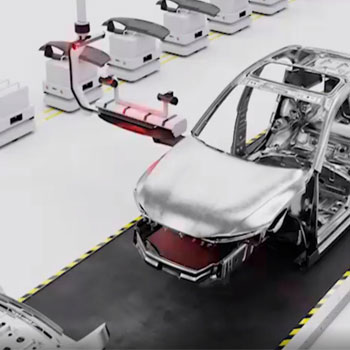
Assembly in motion
- Accurate robot navigation for synchronized movement of robot and object on a production line belongs to one of the most complicated automation challenges in any industry. Through utilization of MotionCam-3D and continuous stream of data we are able to establish real time object position tracking and navigation of manipulators.

Moving objects inspection
- Inspection of stamped/molded pieces is done with a predefined interval to reduce lost time in stopping the conveyor and production process. This approach is time demanding and done now for only every 50th/100th piece thus increasing costs in case of defect. With MotionCam-3D you can ensure continuous quality check & fast identification of errors and take immediate corrective actions.
Robust 3D reconstruction in any condition
High level of detail on unpredictable movement
The logistics industry needs to keep up with the growing demand of the market. Continuous growth in orders requires modern automation solution that require high accuracy scanning of variety of objects that are dynamic. Implementing conventional vision system may prove difficult, however with the unique abilities of MotionCam-3D it is no longer problem to receive accurate measurements or even objects that are in motion.Organic materials and their textures
Produce high-quality images of a variety of food in motion. No need to worry about the color, shape or structure - always get the most accurate point cloud.Large variety of packaging
Whether you want to recognize small boxes or large packages, there is a right model for you. Enjoy immediate results without motion blur.Small up to large surfaces
Enjoy the high level of detail even on edges and thinner objects. Now you no longer have to worry about inaccuracies caused by vibrations or ambient light.MotionCam-3D Color Models

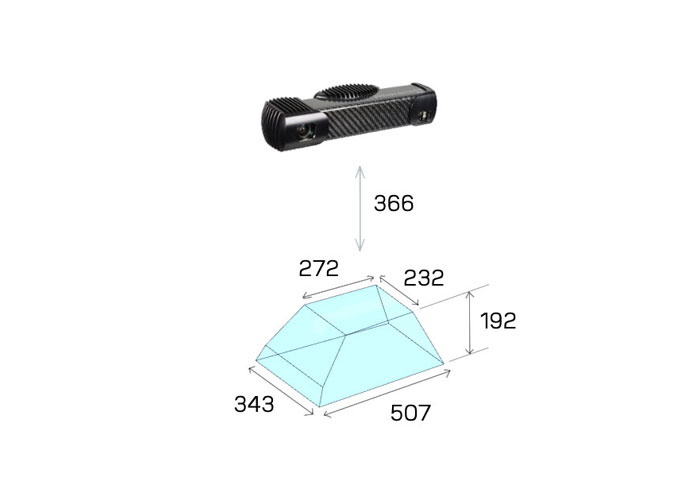
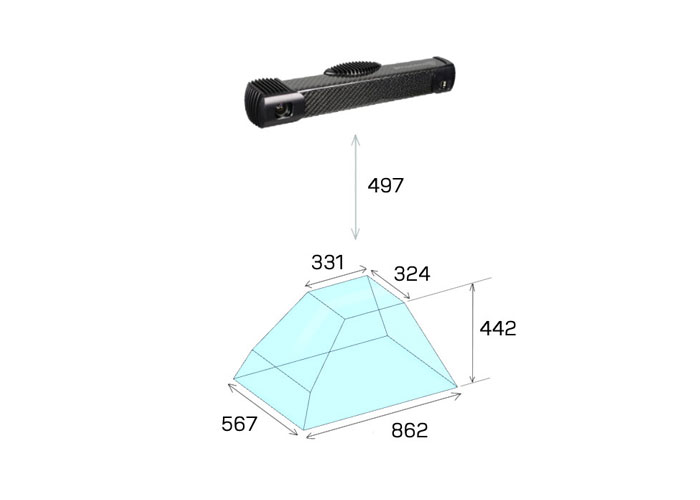
MotionCam-3D S
- The S version of the camera should be utilized for small scenes which you want to capture with the highest possible accuracy.
Datasheet
Parameter Value Scanning range 366-558 mm Camera Mode Point Size 0.37 mm @z = 442 mm Accuracy Temporal Noise Scanner Mode Point Size 0.25 mm @z = 442 mm Accuracy Temporal Noise General Information Depth map resolution (static mode) 1680 x 1200 Depth map resolution (dynamic mode) 1120 x 800 Maximum FPS 20 fps Data acquisition time 10 ms Maximum object / camera speed 40 m/s 3D point throughput 15 million points per second GPU NVIDIA PascalTM Architecture GPU with 256 CUDA cores Dimensions 80 x 68 x 307 mm Baseline 230 mm Weight 1300 g

MotionCam-3D S+
- The S+ version of the camera features a larger scanning volume compared to the S model. Its strong suit is the body size. Its powerful parameters and extended scanning range make it a great companion for every hand-eye project.
Datasheet
Parameter Value Scanning range 630 - 1574 mm Camera Mode Point Size 0.76 mm @z = 900 mm Accuracy Temporal Noise Scanner Mode Point Size 0.52 mm @z = 900 mm Accuracy Temporal Noise General Information Depth map resolution (static mode) 1680 x 1200 Depth map resolution (dynamic mode) 1120 x 800 Maximum FPS 20 fps Maximum FPS 20 fps Data acquisition time 10 ms Maximum object / camera speed 40 m/s 3D point throughput 15 million points per second GPU NVIDIA PascalTM Architecture GPU with 256 CUDA cores Dimensions 80 x 68 x 307 mm Baseline 230 mm Weight 1300 g

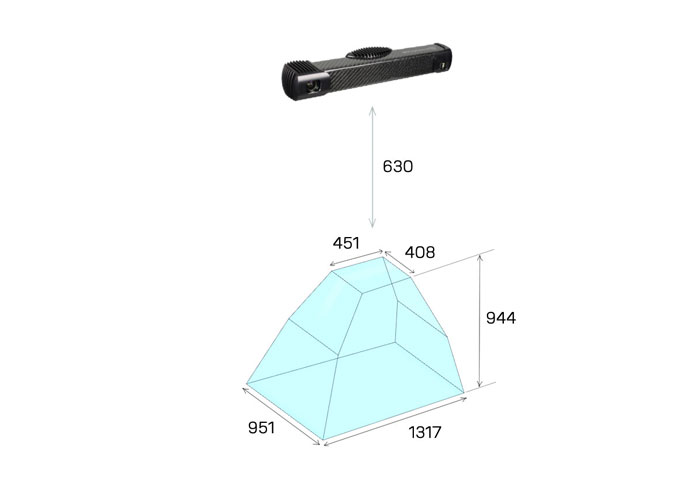
MotionCam-3D M
- The M model of MotionCam-3D obtained a significant boost of the scanning range compared to its smaller brother from the S class. It is optimal for scanning medium-sized objects and scenes.
Datasheet
Parameter Value Scanning range 497 - 939 mm Camera Mode Point Size 0.55 mm @z = 650 mm Accuracy Temporal Noise Scanner Mode Point Size 0.37 mm @z = 650 mm Accuracy Temporal Noise General Information Depth map resolution (static mode) 1680 x 1200 Depth map resolution (dynamic mode) 1120 x 800 Maximum FPS 20 fps Data acquisition time 10 ms Maximum object / camera speed 40 m/s 3D point throughput 15 million points per second GPU NVIDIA PascalTM Architecture GPU with 256 CUDA cores Dimensions 80 x 68 x427 mm Baseline 350 mm Weight 1400 g

MotionCam-3D M+
- The M+ version is suitable for medium and large-sized projects. It disposes with enhanced accuracy compared to the M version.
Datasheet
Parameter Value Scanning range 630 - 1574 mm Camera Mode Point Size 0.76 mm @z = 900 mm Accuracy Temporal Noise Scanner Mode Point Size 0.52 mm @z = 900 mm Accuracy Temporal Noise General Information Depth map resolution (static mode) 1680 x 1200 Depth map resolution (dynamic mode) 1120 x 800 Maximum FPS 20 fps Data acquisition time 10 ms Maximum object / camera speed 40 m/s 3D point throughput 15 million points per second GPU NVIDIA PascalTM Architecture GPU with 256 CUDA cores Dimensions 80 x 68 x427 mm Baseline 350 mm Weight 1400 g

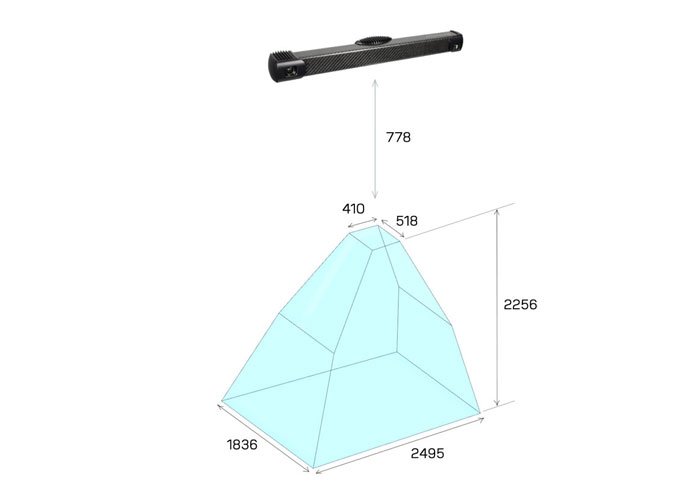
MotionCam-3D L
- The L version provides the ultimate scanning range for the largest objects and biggest volumes.
Datasheet
Parameter Value Scanning range 778 - 3034 mm Camera Mode Point Size 1.05 mm @z = 1239 mm Accuracy Temporal Noise Scanner Mode Point Size 0.72 mm @z = 1239 mm Accuracy Temporal Noise General Information Depth map resolution (static mode) 1680 x 1200 Depth map resolution (dynamic mode) 1120 x 800 Maximum FPS 20 fps Data acquisition time 10 ms Maximum object / camera speed 40 m/s 3D point throughput 15 million points per second GPU NVIDIA PascalTM Architecture GPU with 256 CUDA cores Dimensions 80 x 68 x627 mm Baseline 550 mm Weight 1500 g
PhoXi 3D Meshing
Automated 3D model creation
Fast automatic 3D model generation for any kind of objects
- Output formats:PLY,STL
- 3D Printers
- Inspection softwares
- High-quality scan by PhoXi 3D Scanners
- Superior global scan alignment
- Easy one-click operation
- Possibility to use also as a C++ Library for custom integrations
Applications
- Inspection & metrology
- 3D modeling & reconstruction
- Reverse engineering
Automated 3D model creation
PhoXi 3D Meshing is a utility for quick and easy 3D model creation from multiple 3D scans. It is an useful tool for advanced 3D data acqusition required for applications like robot guidance, quality inspection or reverse engineering. Get in touch with us and get a free trial license.
Scanning software & supported 3rd party programs
PhoXi Control
The PhoXi Control is the control panel behind powerful and compact PhoXi 3D Scanner & MotionCam-3D Sensors. It enables users to control these devices manually via a GUI or by a computer program using the provided API.
Setup your scanning environment or configure the sensor parameters whilst testing the output - all done easily and rapidly. You can also use the GUI as a powerful debugger to ease up your work and maximize your productivity.
Use the computational powerhouse present within our sensors to facilitate the development process as well as reduce the computational time.- Intuitive Graphical User Interface
- High customizability of sensor performance
- Comprehensive 3D viewer
- Powerful API

PhoXi 3D Meshing
- PhoXi 3D Meshing is a utility software for quick and easy 3D model creation from multiple 3D scans. It is a ideal tool for applications like robot guidance, quality inspection or reverse engineering because thanks to the high quality and accuracy of data provided by Photoneo Sensors.
PhoXi Firmware updater
- Update the firmware of your PhoXi 3D Sensors without the hustle. This standalone application uses mechanism independent of PhoXi Control and easily performs the complete firmware update. The application is available starting from firmware version 1.2.26.
Localization SDK
- Software that allows you to translate the produced pointclouds into language of the robot and helps you to navigate it to perform the desired tasks.
Robot Camera Calibration Tool
- Calibrate your robot and 3D vision without an effort with this easy to understand and use tool.
Locator Studio: Simple way of 3D picking

Benefits
- Robot agnostic
- Quick and easy deployment
- Reporting of multiple positions for parts in (x, y, z, rx, ry, rz)
- Resistant to temperature changes
- Open TCP/IP communication protocol
- Localization engine proven by hundreds of applications
Easy, fast & reliable
- The Locator Studio by Photoneo is a new robotic intelligence software that offers an intuitive UX/UI design, high compatibility with any model of industrial robot or manipulator and easy plug & play installation. If you are looking for a product that will help you with your de-racking applications or handling of oriented / semi-oriented objects in a non-collision environment then the Locator studio is a must-use solution.
Use cases
- The Locator Studio represents agile and easy to use software for picking of structured and non-structured objects from shallow bins or easy to access non-collision environments. Best example to imagine ideal application is demonstrated on this racking and de-racking application.
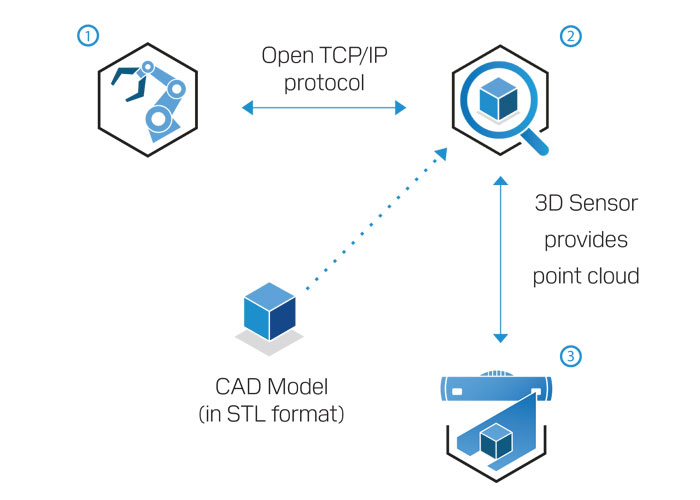
How it works
-
1.Manipulator asks for a position of the object
2. Locator Studio triggers the scan
3. Locator software sends position and orientation data
