Navigation : EXPO21XX > VISION 21XX >
H15: Research and Universities
> Middle East Technical University
Middle East Technical University

- Offer Profile
- KOVAN research lab is founded to study the synthesis of intelligent systems inspired from nature. Our inspiration stems from a wide range fields ranging from social insects to biological neural systems and evolution. Autonomous agents (including robots) are preferred as a major test-bed in our studies.
Product Portfolio
Projects
Border Ownership Project (TUBITAK)
- In this project, we have three goals: (1) Investigate the mechanisms important for determining border ownership. (2) Use and interpret the results of the investigation in item (1) to develop a computational model that would estimate the border ownership of the edges in the images. (3) Apply the developed computational model to important vision problems to demonstrate that using border ownership improves acquisition of reliable and complete visual information.

Development of Hierarchical Concepts in Humanoid Robots Project (TUBITAK)
- In this project, we will study how a (cognitively) developing and embodied humanoid robot can acquire a hierarchical representaion of concepts from its experiences. For this goal, by going beyond the current literature, we will use language, appearance as well as affordances of objects and investigate how these three modalities can affect the formation of the hierarchy. The proposed methods and mechanisms will be demonstrated on a concise scenario involving a humanoid robot iCub interact with a human on a clearly defined task.

CoSwarm
- The main scientific objective of this project is to investigate how and to what extend the dynamics of a robotic swarm can be externally controlled. In the project, a heterogeneous swarm, consisting of two types of mobile robots, one in large numbers but simple, the other in fewer numbers but more complex, will be developed. The experiments to be made with the real robots will be complemented by systematic experiments carried out in physically realistic simulation models that will also be developed.
Embedded Linux for CoSwarm
- The development of KOBOT's imaging subsystem and is intended to expand as the project progresses.

Caligrapher Robot Project
- This project aimed to design a robot controlled by a remote agent through bluetooth connection. A person holding a PDA would be able to control it by moving the stylus. The robot would be capable of holonomic motion, and mimic the path that the stylus draws on the screen.
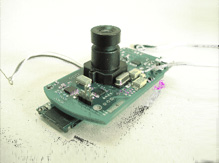
3D Colored Range Image Construction
- The Kurt3D robot acquires distance information of the points in its scan range by using the laser scanner. Since distance information is acquired due to the scan rays, only the distance of the points that are on direction of the scan rays can be calculated. The laser scanner does not give any color information about these points. Color information of these points can be obtained from two color cameras of the Kurt3D robot, if the points are in one of the camera views.
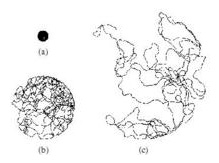
Assessment of space
- How do ants assess the size and integrity of a closed space with limited perceptual sensing, and how can their methods be applied to mobile robots?
Robots
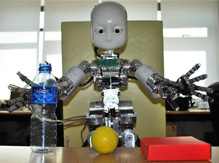
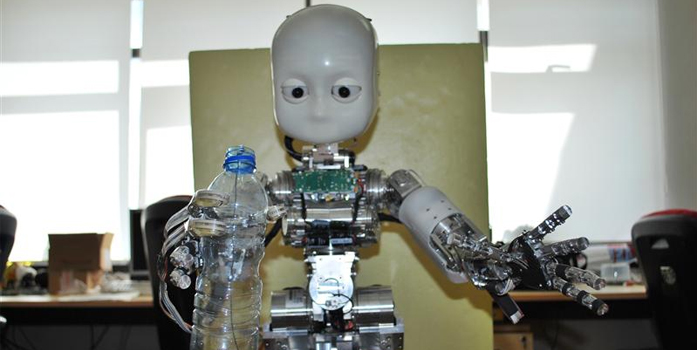
iCub
- iCub is a humanoid robot that we received due to our
successful bid towards getting a humanoid robot platform from the RobotCub
project, ranking 6th among 31 proposals! The project will be carried out in
conjunction with the EU ROSSI project and in close collaboration with Tom
Ziemke and Erhan Oztop.
With iCub, we would like to investigate the development of concepts and communication by interacting with the environment.

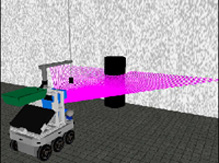
Kurt3D
- Kurt3D is an autonomous mobile robot equipped with a
reliable and precise 3D laser scanner that digitalizes environments. High
quality geometric 3D maps with semantic information are automatically
generated after the exploration by the robot.
Kovan Lab has one Kurt3D robot used in our cognitive robotics projects.

Kobot
- Controllable Swarm Robot: KOBOT
KOBOT has been designed by KOVAN research lab for use in swarm robotic studies. It features:- Asymmetrical body having a circular shape with 120 mm diameter and 70 mm height
- 300 gr weight with standard robot configuration
- differential steering system using two high-quality low-power DC gearhead motors
- 8 infrared sensors
HMC6352, digital compass module - 4 hours of autonomy with Li Polymer batteries
- PXA255 processor for processing images coming from the omnidirectional viewing system
- Remote programming capability via IEEE 802.15.4/ZigBee compliant XBEE OEM RF modules
- 3 bright LEDs and a buzzer on-board to indicate the robot's internal state

Khepera
- Khepera is a miniature mobile robot with functionality
similar to that of larger robots used in research and education. Khepera was
originally designed as a research and teaching tool for a Swiss Research
Priority Program at EPFL in Lausanne. It allows real world testing of
algorithms developed in simulation for trajectory planning, obstacle
avoidance, pre-processing of sensory information, and hypotheses on
behaviour processing, among others.
Very modular at both the software and hardware level, Khepera has a very efficient library of on-board applications for controlling the robot, monitoring experiments, and downloading new software. A large number of extension modules make it adaptable to a wide range of experimentation.

Hemisson
- Hemisson is a nice tool for teachers or hobbyists created
by Swiss company K-Team, Hemisson is a small mobile robot.
Among others, it comes with two motors (to drive independantly both wheels), a great bunch of sensors (including eight light sensors) and a TV remote. It has three pre-installed programs (obstacle avoidance, line following and dance), and 2-hours autonomy.
It is a pre-mounted robot, suitable for teachers who can use it as a demonstration tool, as well as for hobbyists : it can be programmed to change its behaviour, and its firmware can be changed too.
Kovan Lab has five Hemisson robots used in our Swarm-Robotics works.

LEGO Mindstorms
- The LEGO MINDSTORMS Robotics Invention System (RIS) is a
kit for building robots. It consists of a programmable brick (with a Hitachi
H8/3292 microprocessor) named the RCX, and a lot of other traditional LEGO
building parts named TECHNICS.
The RCX has 3 input ports, 3 output ports, and an infrared transmitter/receiver. You can connect the inputs to sensors so that the RCX is aware of what is happening outside. There are many kinds of sensors that LEGO offers but only two kinds come with the RIS package. You must purchase the other ones separately if you want to use them. The sensors that come with the package are two bumpers (touch sensors), and a light sensor. The 3 outputs can be connected to motors, so that your robot can move.