AUTONOHM

- Offer Profile
- The RoboCup team of the Nuremberg Institute of Technology Georg Simon Ohm is based on a cooperation between the faculties of Electrical Engineering Precision Engineering Information Technology and Mechanical Engineering which is part of a joint Automation Center. The research on rescue robots is a highly complex technology which involves the fields of mechanics, actuators, sensor technology and data processing. The synergic competence of our faculties allows our interdisciplinary research team to explore a vast range of approaches with the goal of achieving the ultimate mobility and autonomy for our robots.
Product Portfolio
RoboCup Rescue

RoboCup Rescue
- Autonomous Robotics is an interdisciplinary field of
research which focuses on the cognitive and physical abilities we all need
to use in our daily life. Rescue robots are designed to be employed in
emergency circumstances in which the intervention of human resources is
potentially hazardous or inefficient. It is expected that those systems are
capable of recognizing and understanding the environment in order to perform
their tasks successfully.
The RoboCup Rescue competition simulates a disaster zone, in which robots are used to localize victims. These systems need to find their way through damaged buildings autonomously in order to provide the rescue team with information on the disaster sites and locate trapped survivors.
The RoboCup team of the Nuremberg Institute of Technology Georg Simon Ohm is based on a cooperation between the faculties of Electrical Engineering Precision Engineering Information Technology and Mechanical Engineering which is part of a joint Automation Center. The research on rescue robots is a highly complex technology which involves the fields of mechanics, actuators, sensor technology and data processing. The synergic competence of our faculties allows our interdisciplinary research team to explore a vast range of approaches with the goal of achieving the ultimate mobility and autonomy for our robots.
RoboCup WM 2013
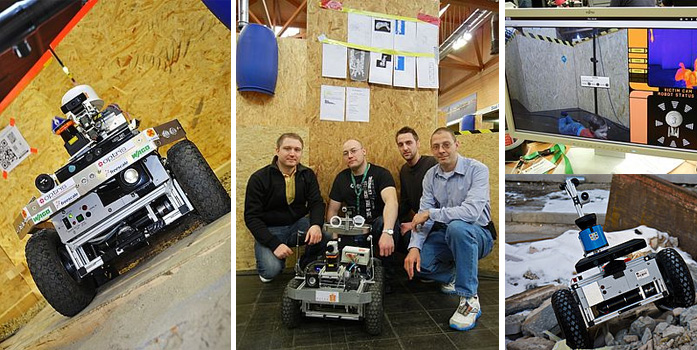
- From 24 to 30 of June the RoboCup team AutonOHM
participated in the RoboCup World Championship in Eindhoven (→RoboCup). A
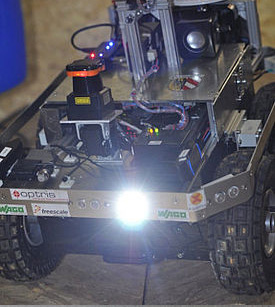
new pan/tilt sensor head improved recognition capabilities of the mobile
robot Georg. With automated QR code and hazmat detection, the rescue team
could focus on its main tasks - the search for potential victims after
disastrous events. Even sand and gravel ground could not prevent Georg from
approaching victims.
After four successful missions, Georg reached the 12th place and demonstrated his capability of competing at an international level. Improvements with respect to his kinematic concept in order to climb stairs as well as a manipulator arm separate Georg for a higher ranking. These tasks are scheduled for preparing the next competition.

German Open 2013
- From 26 to 28 of April the RoboCup team AutonOHM
participated in the RoboCup Rescue German Open competition in Magdeburg for
the second time (GermanOpen). The mobile robot Georg was revised with
respect to sensor systems, data processing and kinematics. As a tele-operated
multi sensor system, Georg is in search of life signs on his exploration
missions.
Georg was in charge of searching for victims, hazmat symbols and QR codes. It was necessary to cross rough terrain: variably tilted ramps, wooden beams and rocks - new this year: sandy and gravel ground.
After four successful missions, Georg entered the final race and reached the second place. The team AutonOHM of the Nuremberg Institute of Technology has qualified for participation to the RoboCup Rescue World Championship