Politecnico di Milano

Videos
Loading the player ...
- Offer Profile
- AIRLab,
the Artificial Intelligence and Robotics Laboratory at the Department of
Electronics and Information of Politecnico di Milano.
AIRLab was established by prof. Marco Somalvico in 1971 as one of the first groups of researchers in Italy working on Artificial Intelligence, Robotics and Computer Vision.
Researchers working at AIRLab have always followed and leaded the evolution of AI and Robotics.
AIRLab professors presently manage one of the largest curricula in Italy on AI and Robotics, producing each year more than 50 master theses and about 10-15% of the PhD theses of the Computer Science and Engineering Section at DEI.
Product Portfolio
Research areas
- The activities at AIRLab are organized in the areas
mentioned here below. Not all the researchers active in the areas have
decided to use AIRWiki to support their activities, so you will find from
the links only some of the activities held at AIRLab, such as descriptions
of ongoing and past projects, project proposals and all sorts of other info
related to the activities in the area.
- Affective Computing
- Agents, Multiagent Systems, Agencies
- BioSignal Analysis
- Computational Intelligence and Games
- Computer Vision and Image Analysis
- E-Science
- Machine Learning
- Philosophy of Artificial Intelligence
- Robotics
- Social Software and Semantic Web
Funded Projects
- Researchers working at AIRLab have always been
involved and proposed projects funded by national and international agencies
and companies.
Among them, we list here some of the most recent ones.
Antares Alternative Non-Testing methods Assessed for REACH Substances
ORCHESTRA Organising dissemination on Results of projects on Chemical Evaluation, Spreading Techniques for Risk Assessment
RAWSEEDS Robotics Advancement through Web-publishing of Sensorial and Elaborated Extensive Data Sets
Industria 2015 Product Intelligence

Project proposals by research area
- Here you can find a list of project proposals for the courses of "Progetto di Ingegneria Informatica" and "Progetto di Robotica" (5 CFU for each student).
C++ Library for accurate marker location based on subsequent pnp refinements
- ARTags, QR codes, Data Matrix, are visual landmark used for augmented
reality, but they could be used for robotics as well. A thesis has already
been done on using data matrix for robot localization and mapping, but
improvements are required in terms generality, accuracy and robustness of
the solution. The goal is thuss to:
- increase the number of markers supported by the system (ARTag + QR codes)
- increase the accuracy of the detection and localization of the marker
- test different algorithms for the solution of the perspective from n points problem

Comparison of State of the Art Visual Odometry Systems
- Visual odometry is the estimation of camera(s) movement from a sequence of images. In case we deal with a single camera system we have Monocular Visual Odometry; in case we have more cameras we have a Stero Visual Odometry. The goal of the thesis is to review the state of the art on in visual odometry, classify existing approaches and compare their implementations (many of the algorithms have online source code available).
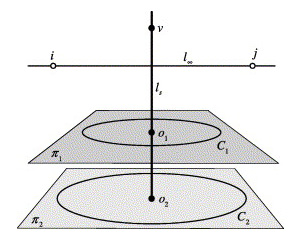
Odometric system based on circular points
- Description: Development of an odometric sensor based on an uncalibrated camera pointing the floor based on circular points. The system should extend an existing prototype introducing a robust mechanism for tracking of feature points, and by integrating possibly available information about the robot motion.

Poit cloud SLAM with Microsoft Kinect
- Simultaneous Localization and Mapping (SLAM) is one of the basic functionalities required from an autonomous robot. In the past we have developed a framework for building SLAM algorithm based on the use of the Extended Kalman Filter and vision sensors. A recently available vision sensor which has tremendous potential for autonomous robots is the Microsoft Kinect RGB-D sensor. The thesis aims at the integration of the Kinect sensor in the framework developed for the development of a point cloud base system for SLAM.
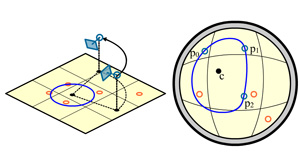
Visual Odometry for an Omni-directional Camera
- An omnidirectional camera can acquire panoramic views of the surrounding environment. The purpose of this thesis is to design, develop, and test an odometric system (odometry = measurement of the path) based on the images taken by an omnidirectional camera during motion. The reference paper to start from is (Taddei, Ferran, Caglioti. IJCV 2012) and the result should be able to extract “feature points” from the images, match them in a robust way, and then apply the machinery for visual odometry on the resulting set of correspondences. A calibration procedure for the system should be provided together with an experimental validatio of the resulting system.
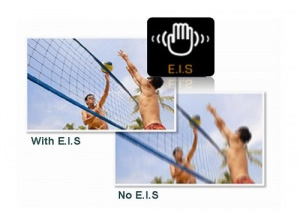
Visual stabilization techniques for tracking with a moving camera
- Target tracking in video sequences can suffer poor performances if the camera is moving (e.g, wind, hand held device, aerial tracking system). The aim of the project is to investigate the state of the art in image stabilization and registration in non static or cluttered scenes. Possible ideas to be investigated include: homography tracking or smoothing, 3D camera motion estimation, image registration and mosicing. As a by product of the work, a tool for the performance evaluation of image stabilization algorithms should be designed.
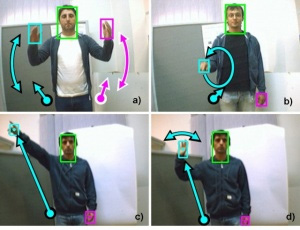
Behavior recognition from visual data
- In the literature several approaches have been used to model observed behaviors and these date back to early approaches in animal behavior analysis (Baum and Eagon, 1967)(Colgan, 1978). Nowadays several techniques are used and they can be roughly classified as: State space models, Automata (e.g., Finite State Machines, Agents, etc.), Grammars (e.g., strings, T-Patterns, etc.), Bayeasian models (e.g., Hidden Markov Models), and Dynamic State Variables. The work will leverage on a huge corpus of techniques to devise the most suitable for behavior recognition from visual data. We exclude from the very beginning any deterministic approach being the phenomenon under observation complex and affected by noisy observations. The focus will be mainly of the use of dynamic graphical models (Ghahramani, 1998) and the application of bottom up learning techniques (Stolcke and Omohundro, 1993)(Stolcke and Omohundro, 1994) for model induction.
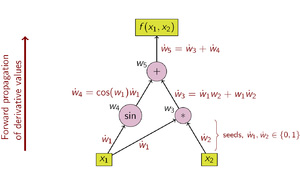
Evaluation of Automatic Differentiation Techniques for Real Time Kalman Filtering
- When writing an Extended Kalman filter one of the most tedious part is computing Jacobians. At the AIRLab we have developed a framework for EKF based Simultaneous Localization and Mapping suitable for different motion models and measurement equations, but any time you need to change something you need to recompute the required Jacobian. Automatic differentiation is a tool for the automatic differentiation of source code either at compiling time or at runtime; we are interested in testing these techniques in the software we have developed and compare their performance with respect to (cumbersome) optimized computation.
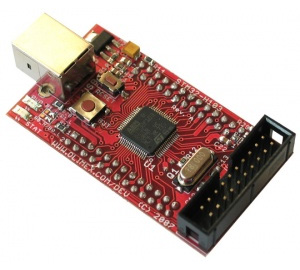
CAN Bus bootloader for STM32 microcontrollers
- In order to speed up the development and the maintenance
of embedded applications, a way to update the firmware on a microcontroller
without the need of connecting cables or programmers can be very handy. We
are developing a framework for rapid prototyping of low-cost robots, with
smart devices that exchange data on a CAN bus network. The CAN bus
bootloader is one of the components we need for this project, enabling
remote firmware upgrades of all the devices connected to the CAN network.
This project aims to develop a CAN bus bootloader for STM32 ARM Cortex-M3 microcontrollers, and eventually for other architectures.
Embedded registers view plug-in for Eclipse
- When developing embedded applications it is frequently
needed to look at *hardware register content* in order to *debug the code*.
All commercial development suites offer register views that show their
contents as well as the meaning of each bit. Open source development
solutions currently lack this feature, meaning that you have to look to the
correct memory location and map the content to the corresponding register
bits manually. This seems to be one of the most limiting issues when
developing embedded application using open source solutions.
This project aims to fill this gap, developing an Eclipse plug-in that shows the register contents in a tree viewer, like most commercial suites do.
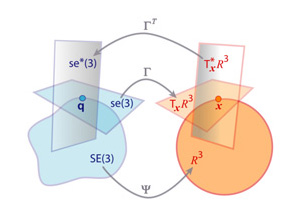
Extended Kalman Filtering on Manifolds
- Extended Kalman filtering is a well known technique for the estimation of the state of a dynamical system also used in robotics for localization and mapping. However in the basic formulation it assumes all variables to live in an Euclidean space while some components may span over the non-Euclidean 2D or 3D rotation group SO(2) or SO(3). It is thus possible to write tha Extended Kalman filter to operate on Lie Groups to take into account the presence of manifolds. We are interestend in investigation this further applying it to the EKF-SLAM framework we have developed.
LCM middleware on embedded platform
- We are developing a framework for rapid prototyping of
low-cost robotic systems. To fasten robot design and building, and to make
software and hardware reuse easier, a modular architecture is mandatory.
In a context of smart modules that have to cooperate by exchanging data to reach their common goal, the communication protocol and middleware are core components. This project is about the middleware component, a publish/subscribe system that takes care of managing topics, publisher and subscribers, and of marshaling data before sending it. This project aims at porting the LCM marshaling and middleware library, developed at MIT and used in the Grand Challenge competition, to embedded systems, in order to exploit the existing LCM tools and to be compliant with an existing and efficient technology.
The project consists in:- stripping non necessary features of LCM to match the constraints of an embedded system and of the communication protocol
- adding necessary features, like the concept of deadline (and priority as a consequence), that are mandatory for a real time distributed system
- building a gateway, on an embedded platform, that acts as gateway
between the standard-LCM world and the embededd-LCM network
The projects has to be developed in ANSI C, and experience with embedded platforms is a plus.

Reengineering of a flexible framework for simultaneous localization and mapping
- In the last three years a general framework for the implementation of EKF-SLAM algorithm has been developed at the AIRLab. After several improvements it is now time to redesign it based on the experience cumulated. The goal is to have an international reference framework for the development of EKF based SLAM algorithms with multiple sensors (e.g., lasers, odometers, inertial measurement ) and different motion models (e.g., free 6DoF motion, planar motion, ackerman kinematic, and do on). The basic idea is to implement it by using C++ templates, numerically stable techniques for Kalman filtering and investigation the use of automatic differentiation. It should be possible to seamlessly exchange motion model and sensor model without having to write code beside the motion model and the measurement equation.
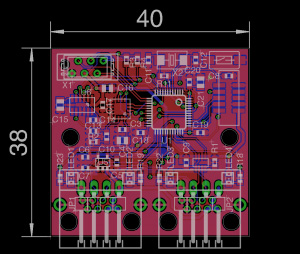
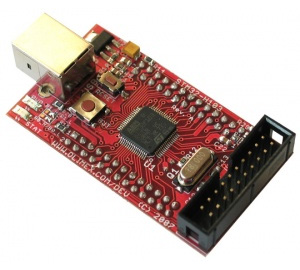
Embedded Inertial Measurement Unit for Unmanned Aerial Vehihcles
- We have developed the electronics of an Inertial
Measurement Unit based on an ARM microcontroller to be integrated on an
autonomous embedded aerial platform. The IMU has already some attitude
heading reference system (AHRS) code implemented, but we are interested in:
- implementing embedded algorithms for the estimation of the IMU attitude to be compared with the actual one (e.g., Kalman filter, DCM, Madgwick, etc.)
- developing a, easy to use, procedure for the calibration of IMU parameters
- making a comparison with commercial units using a robot arm as testbed
- validate the accuracy of the IMU on a flying platform
- integrate the measurements from a GPS to reduce drift and provide accurate positiong (this will make it definitely a MS thesis)
Robocentric implementation in the MoonSLAM framework
- Simultaneous Localization and Mapping (SLAM) is one of the basic functionalities required from an autonomous robot. In the past we have developed a framework for building SLAM algorithm based on the use of the Extended Kalman Filter and vision sensors. The actual implementation of the EKF SLAM in the framework developed uses a world-centric approach, but from the literature it is known that a robocentric approach can provide higher performances on small maps. We would like to have both implementation to compare the results in two scenarios: pure visual odometry, conditional independent submapping.
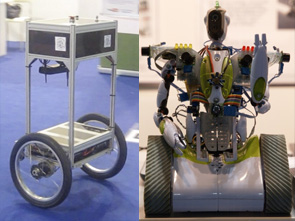
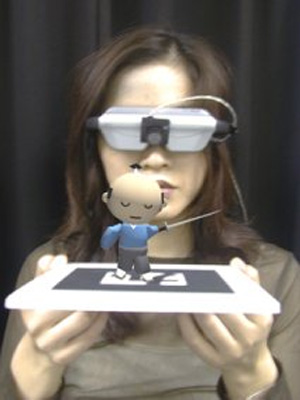
Robot Games
- Projects are available in different areas:
- Design and implementation of the game on one of the available robots
- Design of the game and a new suitable robot
- Implementation/setting of a suitable robot
- Evaluation of the game with users (in collaboration with Prof. Franca Garzotto)
These projects allow to experiment with real mobile robots (Lego Mindstoms, Spykee and other) and real interaction devices such as the WII Mote. The project can be eventually turned into a MS thesis by producing a new game and robot.
Scan Matching Odometry and Multisensor SLAM
- Starting from some C/C++ code for laser scan alignment and the covariance information associated to the matching, we are interested in the development of a library for the matching and fusion of laser scans under the ROS (www.ros.org) environment. From this we are interested in the development of an odometric system based on laser scan matching and in a Simultaneous Localization and Mapping system integrating scan matching with visual SLAM. The result is a complete navigation system that fuses laser and visual information to build consisten maps in an EKF-based environment.
Scripting language on embedded platforms
- When developing embedded applications it is common the
need to test some algorithm in some fast way, without to re-program the
whole firmware every time. PAWN (http://www.compuphase.com/pawn/) is a
*simple and lightweight scripting language with a C-like syntax*. Execution
speed, stability, simplicity and a small footprint were essential design
criteria for both the language and the abstract machine, making PAWN
suitable for embedded applications.
This project aims to port the abstract machine to ARM Cortex-M3 microcontrollers, add a set of functions to interface with the underlying hardware peripherals and then to embed it as ChibiOS/RT (http://www.chibios.org) thread.
Self calibration of multiple odometric sensors mounted on the same platform
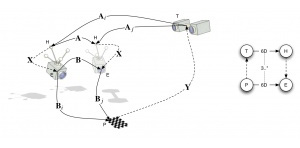
- An odometric sensor measures the path followed by a robot in an incremental way (e.g., wheel mounted encoders, visual odometry, scan matching based odometry, etc.) . Having several odometry sensors mounted on the same platform can significantly improve the accuracy and robustness of the overall system but requires proper calibration of relative positioning and possible biases. We are interested in the development of techniques for the self calibration of a multi sensor based odometry sensor. These techniques could be inspired by classical non-linear optimization techniques used in the hand and eye problem but they could use techniques from Simultaneous Localization and Mapping. According to the setup, some information on the real position of the system may exists (i.e., external tracking system or GPS); the approach should be able to use this information as well.

A critical review on the state of the art in visual navigation for unmanned aerial vehicles
- Visual navigation is becoming more and more important in the development of unmanned aerial vehicles (UAV). The goal of this thesis/tesina is to review in a structured way the current state of art in the field from different perspective: research teams, projects, platforms, tasks, algorithms. The latter is the most important aspect obviously and the project should provide a clear view on what is done today, and obtaining which results. Two kind of operations are of most interest: tracking of fixed and mobile targets (and how this impact on the UAV path), navigation on a geo-referenced map. Implementing one of the standard approaches on a mini unmanned aerial vehicle would be the ideal ending of the work to turn it into a thesis.