- Offer Profile
- MRL's
research programme is tightly connected to the collaboration between the ISR
and the University of Coimbra. Thus, the Lab's numerous educational
activities include doctoral, master and undergraduate programmes.
Additionally, besides its educational programmes, the MRL has several
ongoing general research programmes.
Mobile robotics' research field's subdivisions and related topics have been a subject of study in this lab across the years.
HANDLE - Developmental Pathway towards Autonomy and Dexterity in Robot In-Hand Manipulation
-
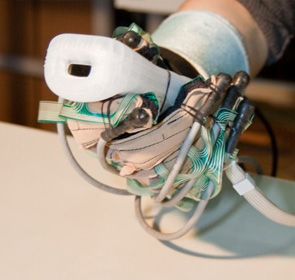
The HANDLE project aims at understanding how humans perform the manipulation of objects in order to replicate grasping and skilled in-hand movements with an anthropomorphic artificial hand, and thereby move robot grippers from current best practice towards more autonomous, natural and effective articulated hands. This project will focus on technological developments and, in addition, research fundamental multidisciplinary research aspects in order to endow the proposed robotic hand with advanced perception capabilities, high level feedback control and elements of intelligence that allow recognition of objects and context, reasoning about actions and a high degree of recovery from failure during the execution of dexterous tasks.
HANDLE: Developmental Pathway Towards Autonomy and Dexterity in Robot In-Hand Manipulation is an European project coordinated by the university Pierre and Marie Curie of Paris and include a consortium formed by nine partners from six EU countries: France, UK, Spain, Portugal, Sweden and Germany.
The field of robotics is undergoing a major revolution as it is increasingly being applied to general purposes outside the production line: for health, rehabilitation and professional services, in domestic and leisure environments, as well as hazardous environments. There, one keystone for robots to carry out accurate and intelligent tasks, with and for people, is their ability both to handle autonomously all sorts of objects and to use human tools. However, today's robots are unable to achieve dexterous and fine manipulation, especially when this requires in-hand manipulation. They are far from being able to understand and reason about their environments, their goals and their own capabilities, to learn skills and improve their performance by what they have been taught and their own experience, to interact with their environments with the efficiency of humans.
The HANDLE project aims at understanding how humans perform the manipulation of objects in order to replicate grasping and skilled in-hand movements with an anthropomorphic artificial hand, and thereby move robot grippers from current best practice towards more autonomous, natural and effective articulated hands. The project implies not only focusing on technological developments but also working with fundamental multidisciplinary research aspects in order to endow the robotic hand system with advanced perception capabilities, high level feedback control and elements of intelligence that allow recognition of objects and context, reasoning about actions and a high degree of recovery from failure during the execution of dexterous tasks.
Integrating findings from disciplines such as neuroscience, developmental psychology, cognitive science, robotics, multimodal perception and machine learning, the method we will develop is based on an original blend of learning and predicting behaviours from imitation and "babbling" to allow the robot to be capable of responding to gaps in its knowledge. 
hand at MRL
hand at MRL

hand at MRL
PROMETHEUS - Prediction and interpretation of human behaviour based on probabilistic structures and heterogeneous sensors
-
The project intends to establish a link between fundamental sensing tasks and automated cognition processes that concern the understanding a short-term prediction of human behaviour as well as complex human interaction. The analysis of human behaviour is unrestricted environments, including localization and tracking of multiple people and recognition of their activities, currently constitutes a topic of intensive research in the signal processing and computer vision communities. This research is driven by different important applications, including unattended surveillance and intelligent space monitoring.

Multisensor Fusion and Multirobot Systems for 3D Reconstruction: DIVA – Dirigível Instrumentado para Vigilância Aérea
-
DIVA is the Portuguese acronym for "Dirigível Instrumentado para Vigilância Aérea".
The project involves a team of researchers from IDMEC/IST, from ISR/Coimbra from the University of Minho.
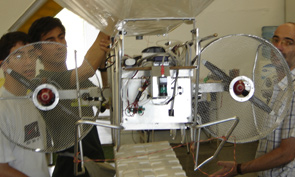
The global goal of the project is the design of a solution based on a small size airship as an aerial stable platform for a semi-autonomous monitoring and surveillance mission.
This is a project in the area of aerial robotics, an area which has justified a growing interest in recent times, with very different application objectives, namely in the civilian domain, for monitoring of roads, detection of forest fires, inspection of power lines. Among the advantages of the airship solution, we may cite its natural stability, low operational costs, reduced pollution, and the ability to move at very low airspeeds or even hover.
The long period of absence of airships resulted in a lower knowledge of their potential usage and flight characteristics. A first objective of the project is to permit a better description of its flight characteristics and propose alternative solutions based on the most recent control techniques, resulting in an aerial platform for semi-autonomous monitoring, with adequate mobility and stability characteristics. The project involves both the area of aerodynamics and the area of modelling and control, along with the area of systems integration, including the relevant aspects of mission safety.
A second objective, already mentioned as an application mission, is to explore the mobility of the airship to develop a surveillance system based on images, to monitor and recognize the motion of objects, allowing the inspection of ground areas with the reference of digital maps drawn from the airship cameras, from a low/medium altitude.The following list is a set of architecture specifications and concepts, separated in airship and ground control categories:
AIRSHIP
- Intelligent semi autonomous mode operation (on board PC will be PC104+).
- Radio control receiver - An human pilot with a radio control unit (as in model airplanes) may take control of the airship at any time, for safety reasons .
- Actuators and flight control:
- 1. Internal combustion engines
- 2. Propellers with 90º vectorization
- 3. Helium valve for emergency landing
- Localization and navigation:
- 1. GPS
- 2. Visual landmarks (digital images from firewire camera)
- 3. Inertial and magnetic sensors
- 4. Pressure sensor
- 5. Wind sensor
- Mission specific sensors:
- 1. High resolution zoom camera
- 2. Environmental sensors
GROUND CONTROL
- Mission planning (with a Ground Station PC)
- Ground station sensors
- 1.DGPS
- 2.meteorological station: wind, pressure, temperature, humidity, etc..
- Wireless Ethernet link between airship and ground
station
- Full monitoring and logging of airship telemetry data
- Ground station can send mission related commands
- allows minimumCORBA (TAO) as a middleware
- Remote control unit





IRPS - Intelligent Robotic Porter System
- IRPS (Intelligent Robotic Porter System) is a Specific
Target Research Project (STREP) co-sponsored by the European Commission
under the Information Society Technology (IST) priority under the 6th
Framework Programmeand and has currently 8 partners which can be found here.
The project addresses the strategic objective of "Advanced Robotics".
As robots are becoming more popular, they should be able to further integrate information and communication technologies with physical interaction capabilities. The main purpose of the IRPS project is to develop an accurate 3D sensing system to be integrated as a modular component for robotics platforms, enabling fast dense mapping of large areas populated with sparse objects. This will make them useful in a new variety of services in the professional and private sector.
The measurements principles developed by IAI-LAHAV (a division of the Israel Aircraft Industries) for 3D measurement provide an opportunity to introduce, in robotics, a highly accurate measurement system, named LIMS. This system is based on an innovative concept of 3D real time measurements of position in presence of sparse objects and vibrations, and will allow mapping of large areas, in real time, at the speed of 5m/s.
The proposed LIMS will thus enable robotics applications with safe, robust and dependable capabilities, allowing operation in human enironments and co-operating with people. In particular, the project will develop and demonstrate the LIMS on an high demanding application as an Intelligent Robotic Porter System to help port and guide the public in airport areas.



BACS – Bayesian Approach to Cognitive Systems
-
By taking up inspiration from the brains of mammals,
including humans, the BACS project will investigate and apply Bayesian
models and approaches in order to develop artificial cognitive systems that
can carry out complex tasks in real world environments.
BACS Objectives
The Bayesian approach will be used to develop artificial cognitive systems concerned with:
- autonomous navigation
- multimodal perception and reconstruction of the environment
- semantic facial motion tracking
- human body motion recognition and behavior analysis.
BACS - Bayesian Approach to Cognitive Systems is an Integrated Project conducted under the Thematic Priority: Information Society Technologies - Sub-topic: Cognitive Systems - of the 6th Framework Program of the European Commission.
Main Goal and Objectives
Goals
By taking up inspiration from the brains of mammals, including humans, the BACS project will investigate and apply Bayesian models and approaches in order to develop artificial cognitive systems that can carry out complex tasks in real-world environments.
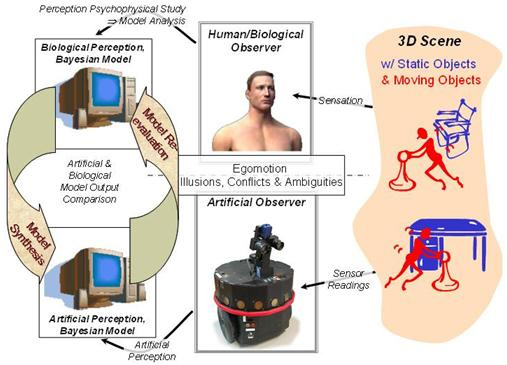
The Bayesian approach will be used to model different levels of brain function within a coherent framework. The Bayesian models will be validated and adapted as necessary according to neurophysiological data and psychophysical experiments. The Bayesian approach will also be used to develop artificial cognitive systems concerned with autonomous navigation, multimodal perception and reconstruction of the environment, semantic facial motion tracking, human body motion recognition and behaviour analysis.Challenges
- The development of feasible probabilistic models of complex cognitive processes for perception and action/decision;
- The successful application of such models on artificial platforms to carry out complex tasks in real –world environments.
Multimodal Perception: a moving observer is presented with a non-static 3D scene containing several moving objects, probably (but not necessarily!) generating some kind of sound because of a working motor, moving mechanical parts or movement friction alone: how does this observer perceive his own motion (egomotion), the 3D structure of all objects in the scene and the 3D trajectory and velocity of moving objects (independent motion)?
Gesture Recognition: when a moving observer is addressed by a human interlocutor, how does this observer interpret the latter’s gestures given the uncertainty intrinsic to their execution and even to their interpretation?