University of Zaragoza (UZ)

Videos
Loading the player ...
- Offer Profile
- The first week of June 2008 a research team of the University of Zaragoza achieved a brain-actuated robot teleoperation between two remote cities (260km). During one week, five subjects used the brain-machine interface to develop navigation and visual exploration tasks with the robot in a remote place. The non-invasive method to record the human neural activity was the EEG, the communication channel between Zaragoza and Barcelona was internet, and the mobile robot was equipped with an orientable camera and an autonomous navigation system.
Product Portfolio
Neurotechnology Projects University of Zaragoza
- The Neurotechnology Lab at the University of Zaragoza has extensive knowledge in the field of "Neurotechnology", with experience in real-time detection of brain states and the respective data analysis methods, as well as in experimental brain imaging techniques (especially EEG and MEG) with development of technology. The technical application domains of this research are neuroprosthetics (robotics) and neurotherapy (neurofeedback).
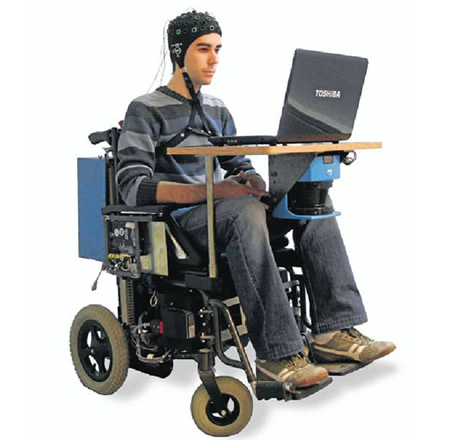
Brain-actuated Robot Wheelchair
- In this project, it was constructed a brain-actuated robotic wheelchair to provide people with severe neuromuscular disabilities a certain degree of mobility. During operation, the user faces a screen displaying a real-time virtual reconstruction of the scenario and concentrates on the location to be reached. The electroencephalogram (EEG) signal processing detects the user’s intents, which are transferred to the autonomous navigation system that drives the wheelchair to the desired location while avoiding collisions with obstacles detected by the sensors. This concept gives the user the flexibility to operate the device even in unknown or evolving scenarios. The prototype has been tested and validated with users at the University of Zaragoza
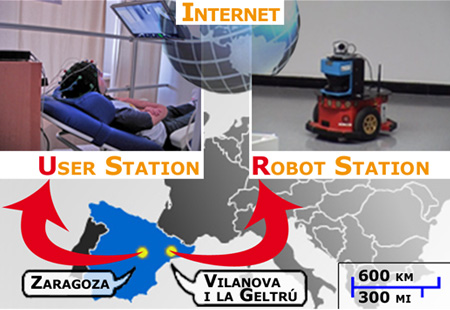
Brain-Actuated Robot Telepresence System
- This project explores the benefits of brain-actuated telepresence robots in remote scenarios for paralyzed users. The patients – unable to leave their clinical environments – are provided a physical entity embodied in a real environment (anywhere in the world with internet access), ready to perceive, explore, manipulate, and also interact, controlled only by brain activity. The underlying idea of the system is that the brain-computer system decodes the user’s intentions; such intentions are transferred to the robotic system via internet, and finally, the robot executes the tasks autonomously. The user can alternate between a navigation mode (to control the robot motion), an exploration mode (to control the camera orientation) and an interaction mode (to interact through sounds and short expressions). This device has been evaluated by users at the University of Zaragoza with the robot in the Polytechnic University of Barcelona, as well as by patients at the University of Tubingen with the robot at the University of Zaragoza.

Brain-Actuated Robotic Arm Prosthesis
- The overall objective of this research project is to develop a new generation of brain-controlled robotic arms, which operate using more natural and intuitive control strategies. This project focuses on augmenting human capabilities compensating for reduced motor functions, in particular for those users who need autonomous manipulation and grasping. The results will be demonstrated by users performing daily manipulation tasks at home using the brain-controlled robotic arm. Furthermore, this project is coordinated with the Faktronik Foundation, which will develop the functional stimulation system (FES) to accomplish the motion of the patient’s arm as an alternative to the robotic arm.
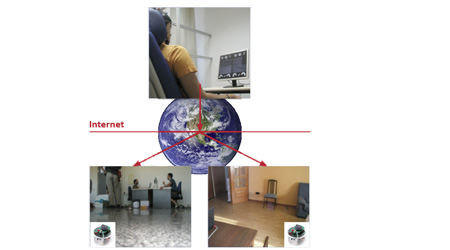
Brain-Actuated Telepresence of Low-cost Robots
- This project explores the benefits of a brain-actuated telepresence system with several low-cost robots located in different and remote places. The developed system allows the user to control simultaneously the motion of two robots located anywhere in the world (with Internet connection) only through brain activity, also providing the user with the functionality of interaction. The mobile robots are low-cost systems, portable (fits into one hand) and equipped with a mobile phone camera. The prototype has been tested and validated by users at the University of Zaragoza.
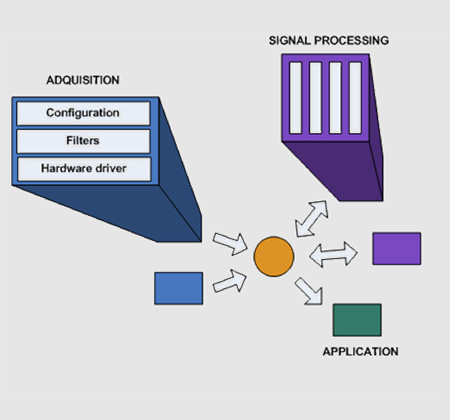
Brain-Computer Interface Software Architecture
- This project explores the benefits of a new software architecture focused on brain-computer interfaces and neurofeedback applications, bypassing the limitations of existent ones. A modular, flexible, and portable architecture is being developed, which will support signal acquisition from several hardware devices, synchronizing them and simultaneously applying several signal-processing algorithms for different applications. Furthermore, it will provide common functionalities according to the brain-computer interface needs as well as interoperability with robotic architectures and other common interaction frameworks.
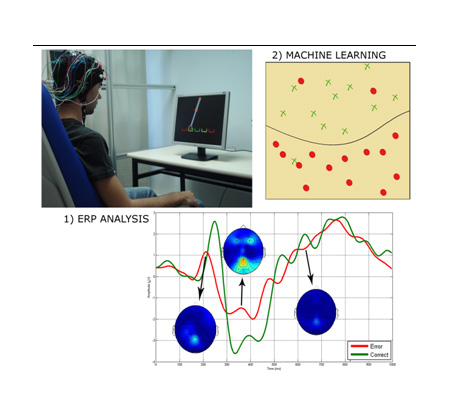
Machine Learning for Brain Computer Interfaces
- In this project, machine learning techniques are being developed to identify and detect online neurophysiologic events, which are meaningful for an EEG-based brain computer interface. Techniques have been successfully developed to identify online P300 and Error-related potentials in single trials. The techniques are based on several spatial filters and state of the art supervised pattern recognition strategies to adapt the performance to each particular user as well as to deal with the non-stacionarity of the EEG on different days. The results have been applied to robot control and online error detection and correction.
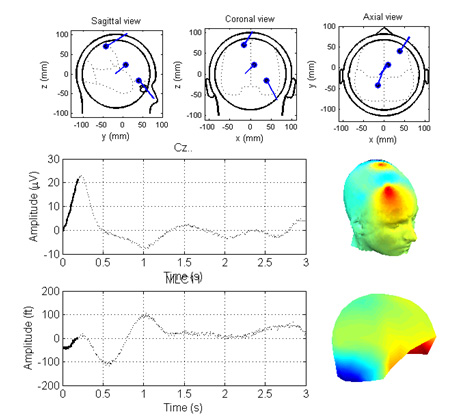
Dynamic Source Localization methods for EEG and MEG
- In this project, new methods are being developed to localize the neural processes of the dynamic brain activity by using simultaneous electroencephalography (EEG) and magnetoencephalography (MEG) recordings or each modality by itself. For such, a methodology was developed for solving the source localization problem considering the dynamic nature of the neural activation within a Bayesian framework. The advantages of the approach are: (1) the variable multidimensionality of the problem is dealt with, (2) different brain dynamics in different areas are dealt with simultaneously, and (3) it is real-time. The technique has been validated using simulated EEG and MEG data from realistic neurophysiologic conditions and transition of brain activations, and also by real EEG and MEG data recorded during a specific neurophysiologic protocol designed to elicit error-related potentials. The approach is being tested using different neurophysiologic protocols and addressing such common problems as the identification of epileptic focus.
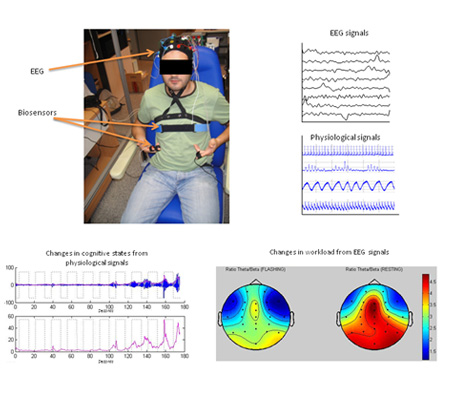
Identification of Cognitive States with a Brain Computer Interface and Biosignals
- In this project an automatic system is being developed to recognize cognitive states (relaxation, stress, etc) through physiological recordings (electrocardiogram, skin conductivity, body temperature, breathing, etc.) and EEG signals. This system is used to perform physiologic understanding and evaluation of users while using a BCI system. This type of system is relevant in order to improve the user-machine adaptability, performance, and robustness. The system is being tested with ALS patients in collaboration with the University of Tubingen. The evaluation results of the telepresence robot showed that while the patient used the P300 BCI to control the robot, various cognitive states, such as relaxation and stress, and also changes between the “alert” and “distracted” states could be identified.

Neurofeedback focused on Attention Deficit-Hyperactivity Disorder (ADHD)
- ADHD is a mental disorder that is reported to afflict approximately 7% of children in the United States. Although the vast majority of studies have indicated that pharmacological treatments can exert a positive effect on its core symptoms, (i) approximately 25% of patients demonstrate either an adverse response or no response, (ii) there is no evidence that the clinical improvements continue in the absence of sustained, long-term treatment, and (iii) the long-term treatment with stimulants involves risks. In this project an EEG-based brain-computer interface system is being developed to be used as clinical therapy in the treatment of the core symptoms of ADHD. EEG biofeedback involves the application of operant conditioning techniques, providing patients with visual and auditory “feedback” for certain “neurofeedback behaviors”, reinforcing or inhibiting electrophysiological activity within specific frequency bands, which may yield sustaining clinical benefits.