
- Offer Profile
- Engineering (ISE) deals with
the modelling, simulation, analysis and realisation of hardware and software
architectures of complex and technical systems.
The Real Time Systems Group (RTS) is part of the Institute for Systems Engineering. Head of the RTS is Prof. Dr.-Ing. Bernardo Wagner. RTS cooperates with the Mechatronic Center (Mechatronik Zentrum Hannover - MZH) of the Leibniz Universität Hannover in joint researches, projects and through technology exchange.
Research at RTS
- The working focus of the Real Time Systems Group lies
on the areas planning of complex technical systems, modelling and analysis
of event-discrete systems with formal methods, software development methods
and devices in the automation technology as well as in the programming and
testing of embedded, networked control devices under the aspect of real
time, reliability and security.
The concerned applications range from systems automation with industrial, stored-program controls to event-discrete (reactive) control of autonomous, mobile robots with embedded microcontrols and real time operating systems.
Currently, the projects of the RTS can be assigned to three different areas:- Localisation and Navigation of Autonomous Service Robots
- Distributed Real Time / Automation Systems
- Educational Technology in Automation Technology and Robotics
In the fields of teaching, especially in the fields of development and introduction of new teaching and learning technologies, the RTS works closely together with the Center for Didactics of Technology (Zentrum für Didaktik der Technik - ZDT) and the Research Center L3S (Learning Lab Lower Saxony).
The RTS focuses its work on the fields of distributed automation systems and mobile service robots. Such systems have to interact with real surroundings in a correct, reliable and secure way and furthermore with deterministic time response, that is in real time.
Examples for the research fields at the RTS are event-discrete modelling, real time programming of embedded controlling devices, networked industrial automation systems, remote handling and control of technical facilities and measuring devices over large distances or real time compatible operating systems.
Distributed Real Time / Automation Systems

Security within Networked Controls
- Imagine a networked washing machine being maintained online by an unauthorized person instead of a service personnel. This can have unpleasant consequences. But, then, what happens when complete production lines are connected to the internet for remote diagnosis purposes? There are new concepts which shall cope with this difficulty. They improve the protection of automation systems from misuse and exploration, however, without neglecting the real time compatibility and economic handling of hardware resources.

Real Time Linux: Xenomai
- The Linux real time extension Xenomai is more and more used as a basis for research and development at the RTS. If possible the further development of this open source project is actively supported. Thus, in the course of studies, the RTnet project evolved. Its goal is to use standard ethernet for communication under hard realtime circumstances. The development team has quickly grown by numerous volunteers from different countries after the publication, so that the project undergoes a highly dynamic progress. The open architecture of RTnet offers a potential for a diversity of fields, starting with the mobile robots of the institute to industrial installations. In the future, the RTS will keep on being actively involved in the coordination and further development of RTnet.

Java in Automation Technology
-
Automation technology demands a
lot more of the software development than desktop applications. This
traditionally concerns the long life cycles of software for control
purposes, the integration of substantial periphery and the demand of
reliability and real time. The growing network requires special care
concerning the access security.
Java opens up a high potential of reusability and compatibility of existing software components through its comprehensive platform concept and its strict object orientation of language. The real time specification for Java (RTSJ) is the precursor for the application of Java under real time conditions, which has been until now only subject to special solutions. The research focuses on the generalisation of these special solutions.

CNet / PNet - Planning of Distributed Control Systems
-
How can distributed control
systems be understood and correctly modelled? And how do you get the
distributed control program from the model? CNet / PNet follows the solution
of these tasks with a mostly graphic model. Hierarchical structures and
distributions are described through the component model CNet. It has
similarities with the functional modules of IEC 61131-3 and IEC 61499.
The components are put together for the models of control as well as the distance. The behaviour of the components is modeled through Petri nets (PNet). PNet uses a time rating and can describe temporal deterministic systems. The results are feasible and formal models which allow simulation and analysis. The distributed control system can automatically be generated out of the control model. The programming language and the internet technologies are fallen back on for implementation.
Localisation and Navigation of Autonomous Service Robots
Service Robots
- Service robots autonomously cut the lawn and weed in large parkways or sports sites. Tourists are comfortably driven to places of interest or from one place to the other on large fairgrounds. Handicapped and elderly people are supported with their everyday problems. Examples like these are numerous where a service robot is a possibility to support the human being. To solve these tasks efficiently, the robot has to know at any time where it is situated. It is therefore searching for the answer to the question: "Where am I?"
Navigation in Outdoor Areas (Field Robotics)
-
To find an answer to this question, the RTS works on a development of a new
navigation method of autonomous systems. A special focus is set on the
navigation in unknown and natural environment here. In opposition to indoor
navigation, where the environment is structured through straight walls,
doors and even floors, the obstacles and objects in outdoor areas are much
more complex. The form and surface of the objects (trees, bushes, houses,
etc.) is irregular and changeable during the time. Influences such as wind
are difficult to be described by discrete mathematical models. However, with
the consolidation of different sensors such as GPS, compass, laser scanner,
wheel sensors and inertial circles, the RTS is capable of generating
independent surrounding models of the working space. With the help of these
maps, a localisation is possible to the accuracy of a few centimeters.
Nevertheless, the adaptability of this method is restricted to plane working spaces where there are sufficient natural landmarks. In order to make navigation possible in hilly regions where there are no definite obstacles it is necessary to collect 3D data.
3D Perception and Navigation
- This project aims at the abstraction of the large data amounts during the gathering of three-dimensional data, so that the robot can accomplish a 3D localisation in real time during its journey. Mathematical algorithms as well as the sensor technology have to be developed by the RTS as there are no commercial products for these kinds of requirements yet.

Robot Platforms at the RTS: ANNICA - Autonomous intelligent vehicle for Navigation
- Annica is the smallest autonomous system that exists at the RTS. The drive results from two independently controllable wheels. A third supporting wheel gives the system the necessary stability. In addition, there are wheel coders attached to each axis with which the covered distance can be measured. The applications are programmed in C and are uploaded via a serial interface on the micro controller MC68HC11 by Motorola. As an additional sensor, Annica contains an infrared distance sensor, a bumper, photographic resistances and a microphone.
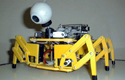
Robot Platforms at the RTS: BRITTA - Scrabbling Robot for Applications in Trained Ambit
- Britta is an autonomous scrabbling/crawling robot. The six independently moveable legs are controlled by twelve servo motors altogether. Each leg is steered by a motor for back-and-forth movements and by a motor for up-and-down movements. The heart of the system is a micro controller 68332 by Motorola. It processes the applications which were developed in gnu-C beforehand. For the navigation tasks, a customary web cam is attached. Furthermore, Britta is equipped with an infra red distance sensor, a microphone and tactile sensors at its legs.

Robot Platforms at the RTS: CARLA - Computer based Robot for problems in navigation
- Carla is the first robot that is used especially for navigation tasks in the outdoor area. Equipped with a standard GPS receiver, two correcting data receivers (DGPS), a 360° laser scanner, an odometer and a radio LAN, this system shall be capable of navigating in an unknown environment independently. Carla is driven be four electric motors while two are attached to each other respectively. This results in the same steering method as with chain vehicles so that even turnaround manoeuvres are possible around its own axis. The data processing is done by a low power pc with 233 MHz and a Linux operating system.

Robot Platforms at the RTS: DORA - Outdoor robot for navigation
- Dora fulfils navigation tasks in outdoor areas as well. The specialty of this system is the possibility of passenger transportation. At a maximum loading weight of 300 kg, Carla can carry up to two persons next a range of sensors.

RTS-MoRob-Kit: experimental platform of the Institute for Systems Engineering
- The MoRob-Kits (Modular Robotic Kit) have been developed based on the modular robot systems deployed at the Institute for Systems Engineering. Those kits make it possible to combine and easily connect varied software drivers and application modules in order to configure, control and build a diversity of different robot systems.

RTS-STILL Robotic Forklift: Kooperation Institut für Systems Engineering - STILL GmbH
- The RTS has - in cooperation with the STILL GmbH, one of the leading manufacturer of forklifts and industrial trucks - developed the prototype of a new and innovative autonomous industrial transport system.
Educational Technology in Automation Technology and Robotics
- The introduction of new learning technologies, the
shift of communication from text and print media to online media and the
changing from linear representation methods to hypermedia and interactive
methods call for an adjusted schooling/education concept. It is a
precondition that scholastics build up on optimising and flexible qualities
to improve the position of universities and polytechnics in the 21st
century. In addition, consulting, services and research in the most
different fields are necessary.
The Real Time Systems Group works together with the Centre for Didactics of Technology on international and nationwide project associations with the aim to develop new learning technologies, new didactic-methodical teaching concepts, media compatible teaching materials and their trials 
MoRob - Modular Educational Robotic Toolbox
-
In recent years, autonomous
mobile robots have developed into a very popular topic with high visibility
in media like television, newspapers and the internet. Their use in
research, entertainment and industrial applications is constantly rising.
Going along with this development is an increasing number of robotics
courses offered at universities, as well as dissertation projects in this
area.
To accomplish such courses and projects, the universities need robot platforms which are flexible and modular so that they can easily be customized to the requirements of different subjects and research goals. The aim of the MoRob project is to develop such a platform and to provide a standard set of control modules and teaching units.
This platform will have the following characteristics:
Scalable performance
Modular setup to facilitate tailoring to courses in the different disciplines
Flexible interfaces
Easy configuration
The new system will not only allow for easy construction of robot systems and their use in robotics courses, it will also be applicable as a vehicle for experimentation in courses on other subjects like programming, signal processing, control theory and artificial intelligence. Therefore a standardized teaching environment will emerge which will be easy to use in a variety of applications.
The project takes place in collaboration with the KTH Stockholm and Stanford university.
Internet-assisted Laboratories (I-Labs)
-
The realisation of theoretical knowledge into application sceneries is
usually practised in experiment laboratories in small teams in scholastic
teaching. Through concrete tasks, the students get to know the handling and
possible application of each field's typical equipment and facilities. In a
joint WGLN-project with Stanford University (Prof. Bert Hesselink) and the
Royal Institut of Technology Stockholm (Prof. Torsten Fransson), the
researchers work on the development and trial of a technology and didactic
of remote-controllable laboratory experiments that can be scaled on
different equipment dimensions via the internet.
The realisation of these laboratory experiments is carried out with real time capable control methods and software components that have been developed at the RTS.