Navigation : EXPO21XX > AUTOMATION 21XX >
H05: Universities and Research in Robotics
> Chiba University
Chiba University

Videos
Loading the player ...
- Offer Profile
- Namiki Laboratory was founded by Prof. Akio Namiki as part of the Dept. of Mechanical Engineering, Chiba University. The purpose of the laboratory is to develop a high-speed and high-performance robot system beyond human. This includes tracking systems, grasping and handling, dynamic manipulation and visual feedback control.
Product Portfolio
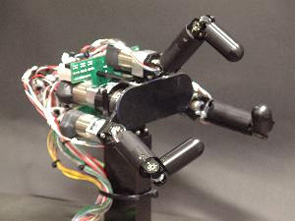
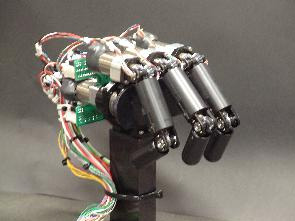
Highspeed Multifingered Hand
- Dynamic grasping using a newly developed high-speed hand system and high-speed vision is proposed. In the high-speed hand system, a newly designed actuator provides the finger with excellent features: It is lightweight (about 110g per finger), and it is moved with speed reaching about 4m/s and 4N power at a finger tip, and backlash is small enough for high-gain feedback control. As a result high-speed motion at 180deg/0.1s is realized. With high-speed visual feedback at a rate of 1KHz, the hand can grasp and handle dynamically moving object. Experimental results are shown in which a falling object is caught by high-speed hand.

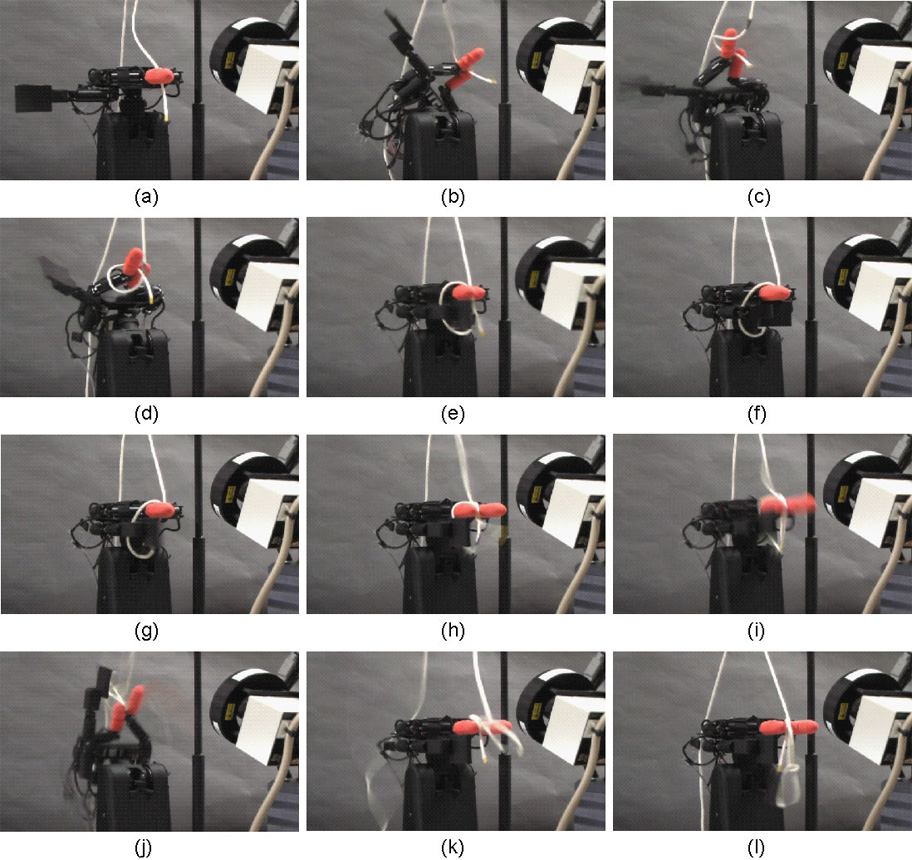
Dynamic Regrasping Using a High-speed Multifingered Hand and a High-speed Vision System
- In most previous studies, it has been difficult for a robot hand to regrasp a target quickly because its motion was static or quasi-static with keeping contact state. In order to achieve high-speed regrasping, we propose a new strategy which we call dynamic regrasping. In this strategy, the regrasping task is achieved by throwing a target up and by catching it. In this paper, the regrasping strategy based on visual feedback and the experimental results using a high-speed multifingered robot hand and a high-speed vision system are shown. As an example of a target for dynamic regrasping, we selected a cylinder and we achieved the dynamic regrasping tasks in the experiment.

Dynamic Regrasping Using a High-speed Multifingered Hand and a High-speed Vision System
- In most previous studies, it has been difficult for a robot hand to regrasp a target quickly because its motion was static or quasi-static with keeping contact state. In order to achieve high-speed regrasping, we propose a new strategy which we call dynamic regrasping. In this strategy, the regrasping task is achieved by throwing a target up and by catching it. In this paper, the regrasping strategy based on visual feedback and the experimental results using a high-speed multifingered robot hand and a high-speed vision system are shown. As an example of a target for dynamic regrasping, we selected a cylinder and we achieved the dynamic regrasping tasks in the experiment.

One Handed Knotting of flexible rope using a High-speed Multifingered Hand
- This research proposes a new strategy of one handed knotting with a high-speed multifingered robot hand and tactile and visual sensors. The strategy is divided to three steps: loop production, rope permutation, and rope pulling. Through these three steps, a knotting is achieved by only one multifingered robot hand. Moreover, this study proposes the control method of wrist joint angle in loop production and the grasping force control in rope permutation.

Highspeed Air Hockey
- The goal of this study is to develop the technology of high-speed human interactive robot in which the robot reads the opponent’s intention and moves in response to the opponent’s motion and human purpose expectation. To achieve this, we develop an air hockey system using a high speed manipulator, high speed image processing method and real-time control system. The manipulator can play the air hockey game based on a recursive trajectory generation using continuous images from high-speed vision. First, the position of the puck is measured by removing noise from the image sequences. Secondly, the motion of the puck is estimated by using recursive least square estimation. Thirdly, the trajectory of the arm is generated so as to defend the goal. Then, we show the data of experiments and verify the effectiveness of the system.

High-speed Throwing Motion Based on Wave Propagation
- The speed of robotic manipulation is slow at present although a mechanical system excels in the speed of motion fundamentally. In this paper the robotic throwing task is taken up in order to achieve high-speed robot manipulation. We propose a strategy focused on the superposition of wave patterns. In addition the contact model for ball control is analyzed. Experimental results are also shown in which a highspeed manipulator throws a ball toward targeted direction.
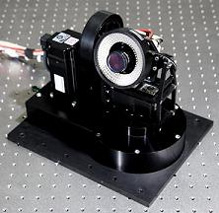
High-Speed Visual Servoing
- Visual servoing using a high-speed vision system which can process an image at a rate of 1 kHz

Master Slave Robot
- High-power slave robot
Telexistence