
- Offer Profile
- Professor Choset's education and research interests straddle the border between computational theory and mechatronic engineering implementation: rigorous mathematical results enable engineering advancements while the practical aspects of implementation drive theoretical derivation.
Snake Robots

Mechanical Design - Trunk Bot - Angular Actuator
- The main challenge in designing snake robots deals with putting actuated joints in a tight volume where we minimize the length and cross sectional areas of the links between the joints. The main concept of our design, as well as many others, is to stack two degree-of-freedom joints on top of each other, forming a snake robot. There are three main schools of designs for these kinds of robots: actuated universal joints, angular swivel joints and angular bevel joints.
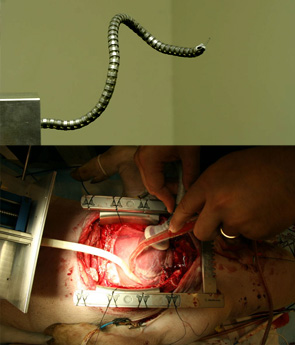
Mechanical Design - Trunk Bot - Surgical
- In order to overcome the limitations of currently available assistive technologies for minimally invasive cardiac surgery (MICS), we develop and tested a first prototype based on an innovative approach of a highly articulated robotic probe (HARP). We hypothesize that, for procedures involving epicardial interventions on the beating heart, MICS can be effectively realized with the HARP, entering the pericardial cavity through a subxiphoid port, reaching remote intrapericardial locations on the epicardium without causing hemodynamic and electrophysiologic interference, attaching to the target surface, and delivering therapeutic interventions under the direct control of the surgeon. We strongly believe that HARP’s functionality will eventually lead to application such as multiple intrapericardial therapies (e.g. cell transplantation by intramyocardial injection, epicardial ablation, epicardial lead placement for resynchronization, etc). Our broad, long-term objective is to fulfill our group’s “epicardial frontier” vision, enabling a growing portfolio of epicardial therapies by developing and testing new dedicated innovative robotic technology. We envision the adoption of HARP-based intrapericardial therapies not only by minimally invasive cardiac surgeons, but also by interventional cardiologists and electrophysiologists.
Mechanical Design - Snake Bot - Modular Design
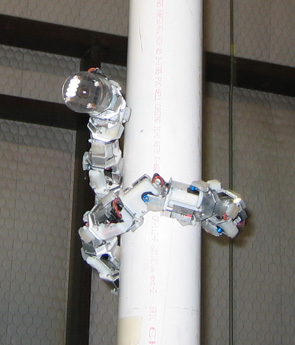
- Snake robots can use their many internal degrees of freedom to thread through tightly packed volumes accessing locations that people and machinery otherwise cannot use. Moreover, these highly articulated devices can coordinate their internal degrees of freedom to perform a variety of locomotion capabilities that go beyond the capabilities of conventional wheeled and the recently developed legged robots. The true power of these devices is that they are versatile, achieving behaviors not limited to crawling, climbing, and swimming.

Mechanical Design - Snake Bot - Skin Drive
- Small robots have the potential to access confined spaces
where humans cannot go. However, the mobility of wheeled and tracked systems
is severely limited in cluttered
environments. Snake robots using biologically inspired gaits for locomotion can provide better access in many situations, but are slow and can easily snag. This paper introduces an alternative approach to snake robot locomotion, in which the
entire surface of the robot provides continuous propulsive force to significantly improve speed and mobility in many environments.
This project is in cooperation with SAIC.
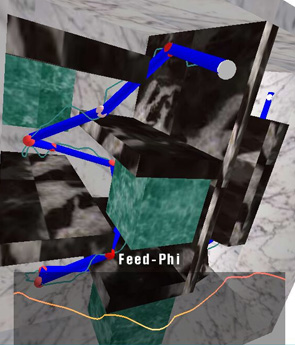
Control Theory - Path Planning - Follow
- Snake robots have many applications, but are hard to
control. A person cannot simply operate each joint of a snake individually
because there are too many. These robots require a motion planning
algorithm. Motion planning for snake robots is difficult because the robots
have many internal degrees of freedom that have to be coordinated to achieve
purposeful motion. In motion planning jargon, this means the snake robots
exist in large dimensional configuration spaces. Our work will make it
possible for the robots to operate in several different modes from fully
autonomous to human-guided. The robot will be able to optimize its own path
based on a range of cost functions from power consumption to safety or even
stealth.
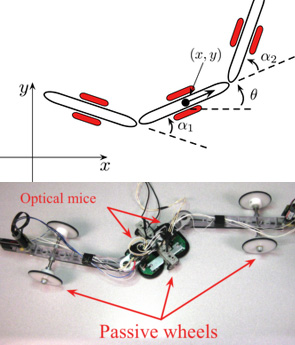
Control Theory - Locomotion - Robotic
- Locomotion describes how mobile systems change their
position by changing their shapes. For instance, the position of the
three-link system shown above is the location of its middle link and the
orientation of that link with respect to the inertial frame, and its shape
is completely described by the two joint angles. By making coordinated
changes to these joint angles, this system can move around the plane, even
if it does not have actuators directly controlling the position variables.
By studying this process, we can both plan motions for new kinds of robots
and better understand how animals move through their environments.
A three-link kinematic snake is like the floating snake, but each link is constrained from moving laterally. The constraint on the middle link prevents the system from moving laterally, so, like the differential drive car, the kinematic snake has only forward and rotational connection vector fields. These vector fields have singularities, which result from interactions between the constraints. The two gaits shown for the kinematic snake trace out the same curve in the shape space, but with different starting points. Because changing the starting point changes the order of forward and rotation motions, the two gaits produce significantly different net displacements.



Surgical Robots - LSTAT/Snake Robot - Life Support for Trauma And Transport - Battlefield Diagnostic Robots
- LSTAT/Snake Robot Project Description:
The LSTAT (Life Support for Trauma and Transport) system incorporates many of the functions of an ICU, but is contained entirely within a stretcher. It houses a defibrillator, an oxygen supply, a ventilator, and various forms of physiological monitoring. It was built and developed by Integrated Medical Systems, Inc., and is currently in use in both Iraq and Afghanistan.
We are working with the US Army's TATRC department (Telemedicine & Advanced Technology Research Center) to integrate a snake robot into the LSTAT system. It is our belief that a hyper-redundant manipulator such as our snake robot will allow medics to begin to examining and treating a wounded soldier even before he has been removed from the battlefield; and that it will do so with highly efficient use of space and a minimum of added weight. As most war-time fatalities occur due to loss of blood, the ability to begin treatment sooner could often make a critical difference. 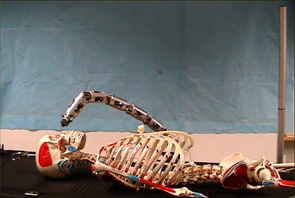
The snake robot inspects the head of a skeleton lying on the LSTAT

The snake robot inspects the abdomen of a skeleton lying on the LSTAT

Our Robots
Modular Snake
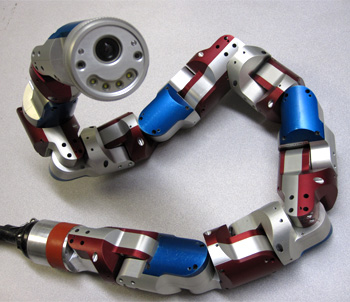
- SNAKE ROBOTS CAN USE THEIR MANY INTERNAL DEGREES OF
FREEDOM TO THREAD THROUGH TIGHTLY PACKED VOLUMES ACCESSING LOCATIONS THAT
PEOPLE AND MACHINERY OTHERWISE CANNOT USE.
Moreover, these highly articulated devices can coordinate their internal degrees of freedom to perform a variety of locomotion capabilities that go beyond the capabilities of conventional wheeled and the recently developed legged robots. The true power of these devices is that they are versatile, achieving behaviors not limited to crawling, climbing, and swimming.
Snake Gaits
Central to the mission of the modsnake project is the development of novel gaits, cyclic inputs on the joint angles of the snake robot whose internal motions provide a net displacement in a desired direction. We have developed several gaits described by a small set of parameters, described below. Although we make no claim to the full generality of our gait model, we have been able to mimic all biological gaits and develop those that go beyond biological capability.
However, many tasks cannot be completed solely by executing a parameterized gait. These cases arise due to task complexity and robot hardware limitations such as size and motor strength. Scripted gaits are developed specifically for the robot to complete a desired task. Examples of such tasks include stairclimbing, gap crossing, reaching into a hole in a wall, railroad track crossing, and camera scanning with the head of the robot
Trunk Snake
- The main challenge in designing snake robots deals with
putting actuated joints in a tight volume where we minimize the length and
cross sectional areas of the links between the joints. The main concept of
our design, as well as many others, is to stack two degree-of-freedom joints
on top of each other, forming a snake robot. There are three main schools of
designs for these kinds of robots: actuated universal joints, angular swivel
joints and angular bevel joints.
Actuated Universal Joints
The simplest design that first comes to mind is stacking simple revolute joints as close as possible to each other and this led to the actuated universal joint design. As the name suggests, he design incorporates a universal joint with two motor to actuate each of the two degrees of freedom of the universal joint. There are many variations of this design: The simplest of which is just stacking revolute joint orthogonally and as close to each other as possible, as seen in Figure 1. These kinds of designs tend to be bulky and slow, hence not appropriate for many snake robot applications.
The main challenge in this design approach is to make the joint as compact as possible, yet strong enough and with appreciable bending range. One of the main benefits of this design is that you need only one motor to actuate one degree of freedom as opposed to the rest of designs in the webpage where two motors are actuated at all times. However, the torques transferred to the motor are relatively larger hence the need of higher reduction. Usually the high reduction is done by using power screws of worm gears hence the slowness of the mechanism.
Angular Swivel Joint Design
The second design that evolved was the angular swivel joint, which is present in the JPL Snake Robot. These are much more compact two DOF joints. The design is simple: starting with a sphere, then slicing the sphere into two parts such that the slice plane is transversal to the south-north pole axis of the sphere. Now rotate one half sphere with respect to the other and notice the motion of the north pole as it traverses a cone of revolution. Connecting two adjacent snake bays via a passive universal joint and then by coordinating the rotation of the two spherical cups generated two degrees of freedom: In-plane bending and orientation. This is the most compact joint design till now. However here we are trying to develop a new compact two DOF joints.
Angular Bevel Joint Designs
Here we are trying to develop a new compact two DOF joints. We work on optimizing the size, strength, reachability and flexibility of these joints. So far we have designed three new types of joints.
We have already designed and built many prototypes:
- Angular Bevel
- Orientation Preserving
- Gearless
- Double Angular Bevel
Medical Snake Robot
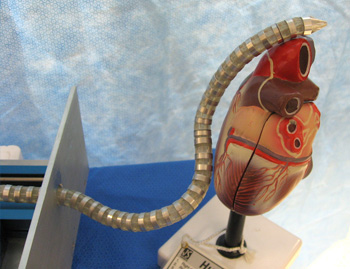
- In order to overcome the limitations of currently
available assistive technologies for minimally invasive cardiac surgery (MICS),
we develop and tested a first prototype based on an innovative approach of a
highly articulated robotic probe (HARP). We hypothesize that, for procedures
involving epicardial interventions on the beating heart, MICS can be
effectively realized with the HARP, entering the pericardial cavity through
a subxiphoid port, reaching remote intrapericardial locations on the
epicardium without causing hemodynamic and electrophysiologic interference,
attaching to the target surface, and delivering therapeutic interventions
under the direct control of the surgeon.
We strongly believe that HARP’s functionality will eventually lead to application such as multiple intrapericardial therapies (e.g. cell transplantation by intramyocardial injection, epicardial ablation, epicardial lead placement for resynchronization, etc). Our broad, long-term objective is to fulfill our group’s “epicardial frontier” vision, enabling a growing portfolio of epicardial therapies by developing and testing new dedicated innovative robotic technology. We envision the adoption of HARP-based intrapericardial therapies not only by minimally invasive cardiac surgeons, but also by interventional cardiologists and electrophysiologists.

Toroidal Skin Drive for Snake Robot Locomotion
- Small robots have the potential to access confined spaces
where humans cannot go. However, the mobility of wheeled and tracked systems
is severely limited in cluttered environments. Snake robots using
biologically inspired gaits for locomotion can provide better access in many
situations, but are slow and can easily snag.
This device introduces an alternative approach to snake robot locomotion, in which the entire surface of the robot provides continuous propulsive force to significantly improve speed and mobility in many environments.
This project is in cooperation with SAIC. SAIC project members included David Anholt and James McKenna.
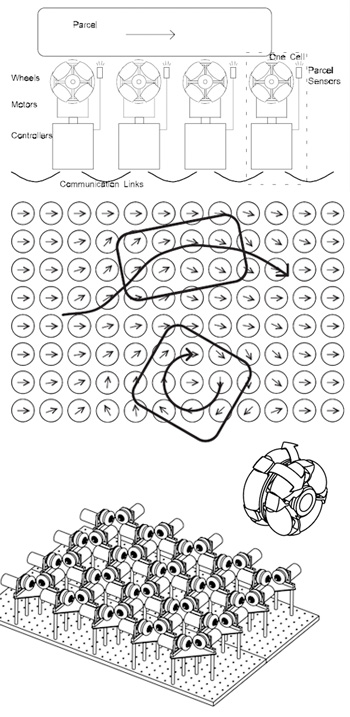
Distributed Manipulation
- We are developing an alternative method for manipulating
objects in the plane, where many small manipulation cells fixed in a planar
array cooperate to handle objects. In our system, each cell consists of a
pair of actuators whose combined action can effect force in any planar
direction to a parcel resting on top of the array. Furthermore, each cell
contains up to five binary sensors which detect the presence of an object.
In our system, the parcels are signifcantly larger than each cell; several cells handle a single object. Through proper coordination, parcels which ride on top of the array can be made to translate and rotate in the plane. Since sensing and actuation are distributed, each of many parcels can be manipulated independently, appearing as if each parcel were carried by a separate vehicle. Hence, the name Virtual Vehicle.
For many applications, a dedicated robot or conveyor is the simplest and most appropriate solution. There are cases, however, where features, such as additional flexibility and reconfgurability, are required. In these cases, the Virtual Vehicle possesses many advantages, including- Flexibility. Since the actuation is distributed, multiple parcels can be manipulated independently. This allows for parcels to be sorted, re-ordered, and re-directed quickly. Objects of many sizes and shapes can be passed along easily, and multiple object pathways can be invoked in parallel.
- Redundancy. Since the Virtual Vehicle System is a massively parallel array of cells, if one cell breaks, the neighboring cells work around the broken cell by either diverting parcels around the broken cell or simply passing parcels over it.
- Modularity/Reconfigurability. Many cells can be produced at a low cost because of their small size and relative simplicity. The cells are designed to "snap" together to form an array. This modularity allows the cells to be arranged in any confguration. The array can be easily reconfigured by moving cells and adding new cells. The modularity also enables easy repair because a broken cell is simply replaced.
- Scalability. Cells can be designed to carry objects of all sizes. For example, micromachined actuators can carry near-microscopic objects such as integrated circuit components, whereas small plastic wheels can carry suitcases (of many sizes) through airports and large truck tires can carry box cars around a ship/train yard.
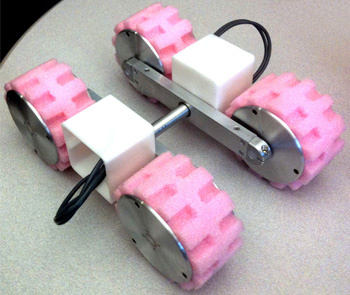
We have built a prototype system consisting of a small array of cells capable of transporting ob jects about the size of a bread box. Each cell consists of a pair of orthogonally oriented motorized roller wheels (Figures 3 and 4) which are capable of producing a force perpendicular to their axes, while allowing free motion parallel to their axes. Each wheel is driven through a gear reduction by a small DC motor.
Fullabot
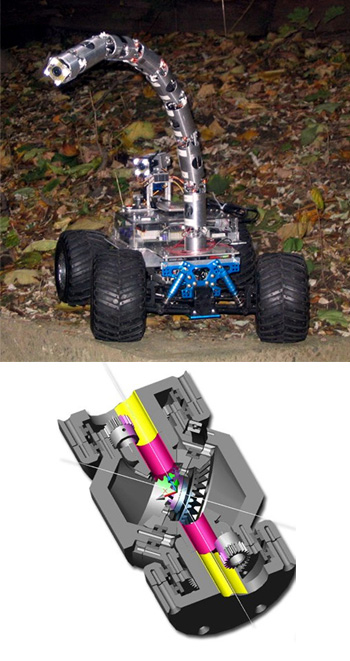
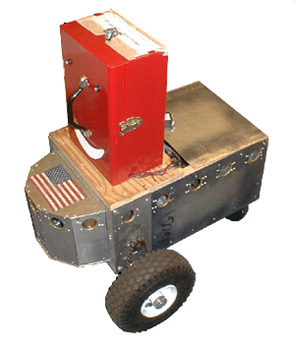
- Fullabot is a passage crawler robot created to navigate
small passages in Egyptian monuments, as well as for urban search and
rescue. With a footprint smaller than a piece of paper and a height of 4
inches, this robot can maneuver effectively in extremely tight spaces. With
actuated suspension, large wheels, and an extremely low center of gravity,
Fullabot can also climb over rough terrain.
This project was headed by Gregg Podnar.
Demining
-
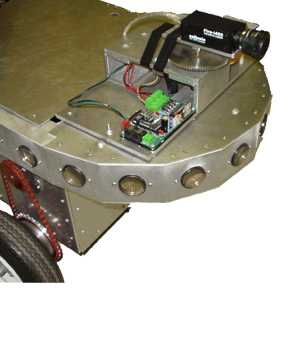
This work develops key technologies for de-mining a target region, whether it be in shallow water, on land, or at the interface between them. The crucial first step of de-mining is finding the mines. Searching for mines is a dangerous and expensive task. The use of robots immediately bypasses the danger, reduces the cost, and potentially speeds the process. In de-mining, a robot must pass a mine-detecting sensor over all points in the region that might conceal a mine. To do this, the robot must traverse a carefully planned path through the target region. The goal of this work is to develop intelligent algorithms that guarantee that the robot completely covers the target region, or portions of the region with a high concentration of targets. This effort also emphasizes that intelligent algorithms do not necessarily require a high computational budget, and thus can operate on inexpensive outdoor mobile robots. Therefore, we are developing new inexpensive outdoor mobile robots and encoding our algorithms on these mechatronic systems.

Hybrid Controls for Integrated Planning and Control
- This work considers the construction of control
policies that address the problem of simultaneously planning and controlling
the motion of a convex-bodied wheeled mobile robot in a cluttered planar
environment. This navigation problem is challenging because of the
relationships among control, nonholonomic constraints, and obstacle
avoidance. The objective is to move the robot through its environment such
that it arrives at a designated goal set without coming into contact with
any obstacle, while respecting the nonholonomic constraints and velocity
(input) bounds inherent in the system.
Conventional approaches addressing this problem typically decouple navigation and control. First, a planner finds a path, and then a feedback control strategy attempts to follow that path. Often the methods assume a point or circular robot body; other non-trivial robot body shapes complicate the problem of finding a safe path, as the path must be planned in the free configuration space of the robot. This leaves the challenging problem of designing a control law that converges to the one-dimensional path, while remaining safe with respect to obstacles. This decoupled approach leads to a loss of robustness that may necessitate replanning during operation, or possibly lead to collision as the robot tries to converge to a safe path. If obstacle avoidance is layered onto the control law, it may invalidate the convergence guarantees of the control law.
We address the coupled navigation and control problem by generating a vector field along which the robot can ``flow.'' Unfortunately, determining a global vector field that satisfies all of these objectives for constrained systems can be quite difficult. Our approach, inspired by the idea of sequential composition, uses a collection of local feedback control policies coupled with a switching strategy to generate the vector field. The conceptual idea is shown below.Instead of attempting to design a complicated global control-law, much simpler control policies are defined over local regions. Composing these relatively simple policies induces a piecewise continuous vector field over the union of the policy domains. A policy is specified by a configuration dependent vector field defined over a local region of the robot's free configuration space, termed a cell. From this vector field and knowledge of the current robot state, the control inputs are determined such that the closed-loop dynamics flows to the specified policy goal set within the cell
A discrete transition relation, which can be represented by a graph, is induced by the transition between the domain of one policy to the domain of a second policy containing the goal set of the first policy. On-line planning, and re-planning under changing conditions, becomes more tractable on the graph, allowing us to bring numerous discrete planning tools to bear on this essentially continuous problem. By sequencing the local policies according to the ordering determined by a discrete planner, the closed loop dynamics induce the discrete transitions desired by the discrete plan. The overall hybrid (switched) control policy responds to system perturbations without the need for re-planning. In the face of changing environmental conditions, the discrete graph allows for fast online re-planning, while continuing to respect the system constraints.
By coupling planning and control in this way, the hybrid control system plans in the discrete space of control policies; thus, the approach represents a departure from conventional techniques. A ``thin'' path or trajectory is never explicitly planned; instead, the trajectory induced by the closed-loop dynamics flows along the vector field defined by the active policy, which is chosen according to an ordering determined by a discrete planner. A plan over the discrete graph associated with the collection of policies corresponds to a ``thick'' set of configurations within the domains of the associated local policies.
local feedback control policies
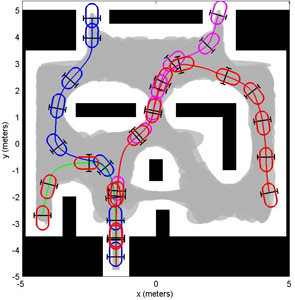
- Four different initial conditions converge to the overall goal specified by the composition of local feedback control policies. The plot shows actual robot data.
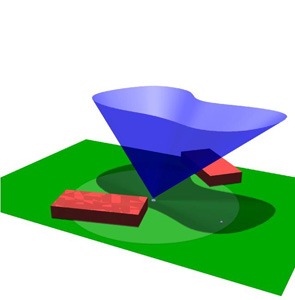
"Complicated" potential based control policy
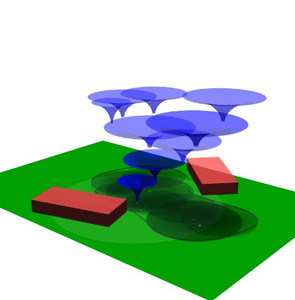
Composition of simple control policies
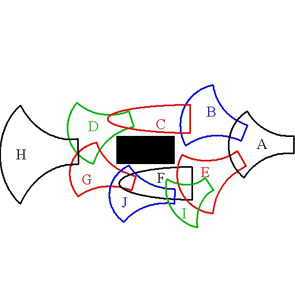
Policy schematic with goal set to right
Induced transition graph