
- Offer Profile
Much of ARRI's research revolves around SMART MICROMACHINES which can emulate human functions, such as, perception, cognition, motion, communication, and interaction with the environment, humans, and among themselves. Smart micromachines are essentially heterogeneous microscale systems consisting of integrated sets of sensors, actuators, processors, and fluidic, optical or RF circuits. They can be embedded into smart materials, possibly on flexible substrates, or packaged as discrete standalone devices, or networked into integrated systems with power harvesting, communications and/or self-diagnostics features. Key elements of our program include a focus on piezoelectric materials and on applications to medical microdevices.
Robot Life
- Overview
A new generation of robots is being developed to more closely emulate human and animal functionalities such as facial expressions, compliance, and advanced mobility.
Approach
The goal is to develop commercializable systems for entertainment, medical simulators, cooperative assembly with humans in a manufacturing environment, and sensor deployment in unstructured and hostile environments.
Accomplishments
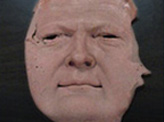
A key element in our approach is the development of novel materials for different types of artificial tissue. These materials are “smart” in that they include embedded sensors, actuators and microfluidics. They can be used to enhance the performance of humanoid and biomimetic robots and robot teams. 
Quickskin™
- Quickskin™: embedded piezo unimophs and multifiber composites into silicone elastomer. This sample skin is responding to curving, folding, and punching via electrical voltages of a few volts per Newton of applied force.
MAYA simulation interface
- A MAYA simulation interface is used to analyze the kinematics and dynamics of the robot, and generate complex motion sequences.

Quickskin™ patch
- A Quickskin™ patch mounted on the CRS-A465 6-DOF Robot arm allows an operator to move the robot arm by directly pushing on it.

ROBOVIE-M2/M3
- ROBOVIE-M2/M3 are biped robots with 20+ degrees of freedom, equipped with PWM-controlled RC-servos, accelerometers, and an on-board CPU. It is capable of throwing objects, punching, somersaulting, doing handstands, running, side-stepping, and playing soccer!
Discrete Devices : Medical Microdevices
- Objective:
Research and development of miniature cost-effective microdevices including sensors and actuators for medical applications targeting implants, in vivo and ex vivo diagnosis and surgical instrumentations.
Approach:- Batch fabrication and manufacturing processes to ensure cost effectiveness and miniaturization.
- Application and problem-oriented approaches to address needs in medical applications.
- Target the whole systems in solving medical issue and addressing patient’s needs and surgical/treatment procedures.
- System configurations include telemetry, micropumps, chemical sensors, physical sensors, electrodes, optical interrogation, magnetic interrogation, fiber optics, MEMS sensors and actuators, microrobotics and control mechanism.
Accomplishments:
- Demonstration of in vivo near infrared fiber optics scanning probes for brain tissue imaging, artery imaging, skin cancer early detection, active endoscopy and retinal detachment and retinoschisis diagnosis.
- Demonstration of miniature impedance and pH sensors for GERD (gastroesophageal reflux disease) monitoring.
- Demonstration of sensors on flexible substrates for implants.
- Micropackaging and demonstration of safe implantable drug delivery systems.
- Demonstration of wireless chemical and physical sensors. Applications include prevention of sudden infant death syndrome (SIDS) and for senior/patient homecare.
- Demonstration of integrated pain management by neurostimulation.
- Design and demonstration of integrated bandages for wound healing
In vivo imaging probe.

Implantable GERD sensor on a flexible substrate.

n integrated pain management system.
Discrete Devices : Piezoactuators
- Objective:
Design and fabrication of high displacement and high force actuators for applications including vibration suppression, shape-morphing, distributed actuation, energy harvesting and health monitoring..Approach:
- Metal – ceramic composite actuators.
- Low – profile ceramic fiber composites.
- Piezoelectric motors.
Accomplishments:
- “Piezo-Bow” actuator which exhibits high displacement and high blocking force at low frequencies was designed, analyzed and fabricated. The structure consist of a piezoelectric bar poled along the length with metal caps attached to the two major faces of the bar bounded by steel blocks.
- In frequency ranges below 2 kHz, a linear displacement of 8 mm at an applied field of 3.3 V/mm was obtained. The actuator size was 7x7x30 mm³ and exhibited stresses of the order of 30 MPa.
- Experiments are in progress to design and fabricate PZT fiber based composites which can provide high blocking force. Such actuators will find immediate
ZT fiber composite laminate.
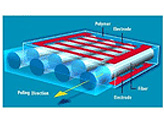
Diagram of a PZT fiber composite laminate.
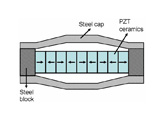
Piezo-bow actuator.
Discrete Devices : Piezotransformers
- Objective:
Miniaturized cell-phone battery charger using piezoelectric transformers, and integrated note-book/laptop power adapter.
Approach:- Piezoelectric transformers with drive circuit/charger systems have enormous potential to reduce bulky electromagnetic transformers, increase energy efficiency and reduce the dollar cost per unit.
- Exhibit huge power densities, in the order of 40 W/cm³.
- 96%-98% efficiency range require no heat sinks.
- Provide true power isolation and eliminate stray magnetics.
Accomplishments:
- A multi-layer piezoelectric voltage and power transformer which has one direction poling, operates in a wide-frequency range and delivers both step-up and step-down voltages by inverting the electrical connections has been developed, characterized and implemented.
- A complete equivalent circuit model and FEM model for the above design has been developed and used to verify the experimental results.
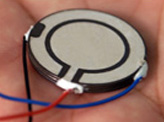
iaturized piezo transformer prototype.
Discrete Devices : Energy Harvesting
- Objective:
Self powered sensor networks with focus on industrial health monitoring, aircraft structural health monitoring, perimeter security nets and border intrusion monitoring. Goal is to reach the power density of 2mW/cm².
Approach:
Accomplishments:
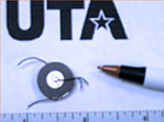
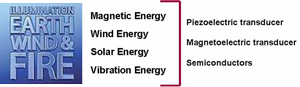
Build several prototypes to harvest the vibration and wind energy. Pictures below show the prototypes of the piezoelectric windmill and vibration generator. Our current work includes the design of energy harvesting chips, consisting of 3D layers containing multiple types of energy capturing technologies.
The prototyping of a multi-energy input, 3D harvester is in progress. 
Miniaturized windmill for powering unattended sensors.
Design and prototyping of a miniature vibration energy harvester.

Discrete Devices : Micropumps
- Objective:
Low-cost implantable devices for drug delivery, with flow rates in the nano and micro liter per minute range.Approach:
In-plane micropump- DRIE micromachined in-plane moving diaphragm structure. The in-plane structure can create small pumping volumes for precision flow control. Manufacturing requires only one mask to fabricate valves, pumping chamber, actuators, and channels.
- Thermally or piezo actuated.
- Stroke amplification mechanism to increase compression ratio.
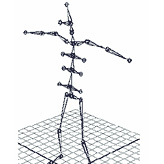
- Diffuser and nozzle structure to direct flow.
- Molded Parylene tube to insulate flow from moving diaphragm.
- Fluidic & electric interconnects using die bonding for compatibility with fluidic boards.
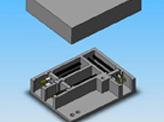
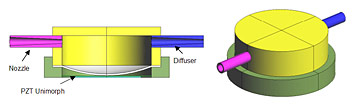
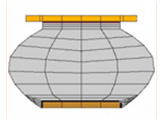
Out-of-plane micropump
- PZT out-of-plane moving diaphragm integrated with a PDMS pumping chamber is shown below.
- Simple design with valveless structure.
- Low fabrication cost.
- Low power operation.
- High flow rate.
Applications:
Implantable drug delivery systems for the treatment of diabetes, pain, or chemotherapy. Cancer treatment will be improved by accurate, timely, and localized drug dispensing close to tumor site maximizing the drug effect while minimizing harmful influence on whole patient body.
Accomplishments:- Laboratory prototypes operational and fully characterized.
- Application to in-vivo drug delivery for chemotherapy.
- Objective:
Design of in-plane silicon micropump.

DRIE machined silicon micropump structure.
Parylene tube placed in the pumping chamber.
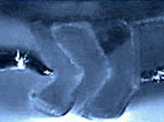
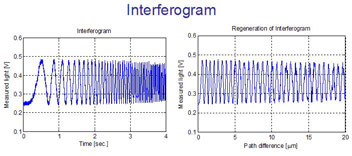
Discrete Devices : Microspectrometer
- Objective:
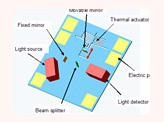
Development of a miniaturized Fourier transform spectrometer (FTS) which can be used as a hand-held, real-time, and on-site detection mechanism for bio and chemical materials.Approach:
- Integration of heterogeneous 3-dimensional optical system on silicon microoptical bench by combining silicon micromachining and microassembly.
- Implementation of a higher resolution spectrometer by a thermally actuating long stroke stage.
- Precise positioning and alignment of microoptical components.
Accomplishments:- Implementations of a miniaturized FTS by assembling micromirrors, a ball lens, and beam splitter on SOI silicon die.
- Characterization of static and dynamic responses of the scanning mirror mechanism.
- Preliminary experiment results show that the spectrum peak was at 632nm with 25nm FWHM using He-Ne laser source and designed stroke amplification that can produce spectral resolution of <10nm in visual wavelength.
- Objective:
A miniaturized FTIR spectrometer.

Assembled microsphere with a silicon holder.
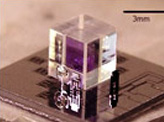
Assembled microspectrometer.
Discrete Devices : NOx Microsensor
- Objective:
Development of a capacitive, highly selective NOx sensor and integration in a chemical health monitoring system.Approach:
- Inter-digitated electrode to detect capacitance changes.
- Deposited organic polymer films, highly selective to the target gas.
- Packaging with embedded electronics to improve sensitivity and SN ratio.
Accomplishments:
- Microfabricated electrode array and wirebonded package.
- Completed gas sensor testing infrastructure with PPB-levels gas mixing and flow control system.
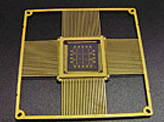
Fabricated and packaged sensor electrode.
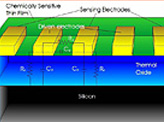
Detection principle based on capacitance measurement.

Experimental sensor board for chemical testing.
Discrete Devices : Magnetoelectric Sensors
- Objective:
To develop a high sensitivity magnetoelectric nanocomposite material targeting applications such as: power generation, magnetic field sensor, anomaly detector, microwave filter and resonator, RF signal generator, voltage transformer, and high frequency switches.Approach:
Various structures are being experimented to analyze the magnetoelastic coupling in the ferromagnetic – ferroelectric composites.
Accomplishments:
We have been uniquely successful in developing high sensitivity materials and implemented them in several applications mentioned above. A comparative chart for sensitivity is provided below.
Magnetoelectric transformer designed and built at ARRI.
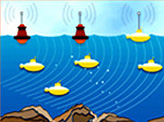
Distributed Devices : Mobile Sensor Networks
- Objective:
Development of algorithms and prototype vehicles for wide-area surveillance and reconnaissance using mobile sensor networks (MWSN). Monitoring on land, water and air using large numbers of mobile sensor nodes is demonstrated at our Distributed Intelligence and Autonomy Lab (DIAL).Approach:
- Deployment of large numbers of sensors using heterogeneous robotic platforms including inexpensive ARRI-Bots.
- Use of a Potential Fields (PF) approach to achieve mobility subject to communication bandwidth, energy and navigation/collision.
- Use of Extended Kalman Filter (EKF) for information gathering, localization and navigation.
- Use of a Discrete Event Controller (DEC) for resource allocation and mission planning.
- Data logging and supervisory control using Labview for managing and visualization of sensor networks.
- Platform independent algorithms: Land, Aerial, Underwater.
- Adaptive Sampling (AS): Efficient, information-driven sensor deployment.
Types of Deployment Algorithms:
- Communication-Aware deployment consisting of dynamic sensor repositioning in the presence of network communication constraints.
- Information-Aware deployment consisting of optimal placement of mobile sensors to gather the most information.
- Mission-Aware deployment consisting of resource coordination to accomplish a common mission.
- Energy-Aware deployment consisting of conservation and harvesting of energy for sensor network sustainability.

Cooperative mapping & location.
- Description
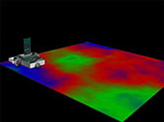
Multisensor fusion for distributed fields.
- Description

reless & underwater networking.
- Description

Land-based mobile robot fleet at DIAL
- consisting of inexpensive mobile robots carrying wireless sensors is used to study deployment algorithms.

Bandwidth Maximization using Potential Fields:
- A potential field is used to reposition sensor nodes to maximize network bandwidth.
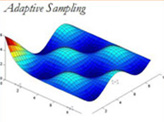
Adaptive Sampling (AS)
- aims to reconstruct a distributed sensor field
from multiple measurements.
AS
- is much more efficient than conventional Raster Scan Sampling.
Flexible Substrates: Embedded Microdevices
- Objective:
Fabrication of the bio compatible polymeric materials with embedded actuators and sensors.Approach:
- High strain elastomer materials are selected as polymeric substrates.
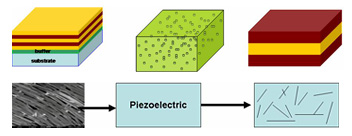
- Piezoelectric fiber composite actuators are embedded in the elastomer.
- Micro sensors and fluidics are arrayed in the elastomer matrix.
- Integration with microelectronics, digital signal processors and wireless communications.
Accomplishments:
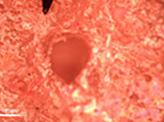
Pictures below shows the porous structure of the silicone based elastomer and the same material after embedding the sensors and actuators. Flexibility of the elastomer matrix is not affected by the micro piezoelectric actuators. 
Microfluidics in a flexible substrate.

Quickskin™ is a UTA patented pressure sensitive robot skin.
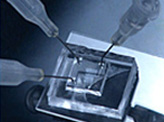
Robotic Assembly : Microrobotics
- Objective:
Cost effective precision assembly of heterogeneous micro and nano systems. At high assembly yields, this technology is a viable alternative to monolithic fabrication. MEMS microrobots are also a viable top-down pathway to nanomanufacturing.
Approach:
Two-prong approach based on:- A meso-micro-nano assembly platform for MEMS millimeter to micron part sizes and nanometer tolerances. This platform uses microrobots built on a wafer.
- A micro-nano assembly system built using these microrobots.
MEMS grippers and fasteners made from various materials are used to assemble cm-size complex MEMS such as the micro-spectrometer die shown above.
Accomplishments:
- Microgripper, passive and active micro snap-fastener technology for MOEMS assembly.
- Successful assembly of heterogeneous MEMS and MOEMS: interferometer, spectrometer, safe & arm devices, fiber arrays, fiber interconnects, PIN diodes, and many others.
- Reliable automated handling of parts with dimensions as low as tens of microns, and sub-micron feature sizes.
- Modeling and motion control for electrostatic and thermal MEMS.
- Significant performance improvement of MEMS devices via open or closed loop control. Input shaping and closed-loop control of MEMS with applications in VOA, MEMS switching and other optical and RF-MEMS.
Robotic Assembly : Multiscale & Modular Robotics
- Objective:
To develop a systematic methodology for designing automated machines that enable assembly and packaging of small-scale systems. These multiscale robots operate across scales from macro to nano, and their design is guided by a set of hierarchical precision principles. They target low-volume pilot production of sensors, actuators, and other heterogeneous microdevices by using reconfigurable and modular hardware and software. 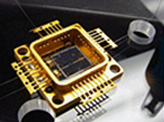
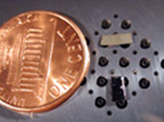
Packaged S&A Microdevice,
- manufactured at ARRI using the M³ via automated, heterogeneous microassembly.
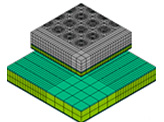
Robotic Assembly: Active Surfaces
- Overview:
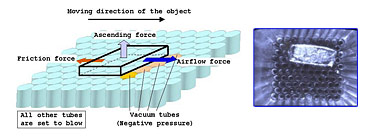
Parallel manipulation of multiple micro-parts to improve throughput of microassembly by providing gripping, sorting and aligning functions.
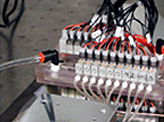
Approach:- Force field created by pneumatic pressure source through micron size nozzle arrays, or through ultrasonic vibration.
- Individually controlled nozzle pressure for translation, rotation and flipping of parts.
- Distributed manipulation algorithm to scale up for massive parallel manipulation.
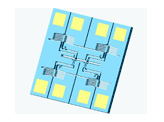
Active surface device using pneumatic force field.
Accomplishments:- Prototype active surface device using pneumatic force field to manipulate parts as small as 1mm².
- Combined piezoelectric actuation with pneumatic force field. Motion resolution is micron range.
- Simultaneous translation, rotation, and flipping of multiple parts.
- Overview:

- Active surface device using pneumatic force field with piezoelectric actuation.
Micropackaging : 3D Packaging
- Overview:
Develop novel methods for the compact and reliable packaging of microdevices, thus enabling heterogeneous and multifunctional integration.Approach:
- Wafer and die-level stacking and interconnects of electronics, MEMS, optics, and fluidics.
- Vertical interconnects between stacks including electrical, fluidic and optical connectivity.
- Multifunctional integration of components enables modular architectures.
Simultaneous BCB wafer bonding and 3D interconnect formation.
Accomplishments:- Wafer bonding using BCB for microfluidic packaging.
- Die stacking using fluxless soldering.
- Simultaneous bonding and interconnects using BCB and SnAu microbumps.
- Packaging of microdevices such as implantable drug delivery systems and S&A devices.
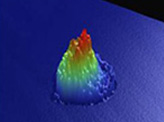
- Optical 3D Profiler image of a reflown electrical interconnect.

- Patterned silicon wafer with microfluidic channels

- Laurier Die Bonder in the Texas Microfactory™ used to form 3D interconnects.
Micropackaging : Reliability
- Overview:
We are working on a family of reliability studies of micro-electronic and MEMS devices. Major research is been done at ARRI on microsystem design for reliability, hermetic packaging, and characterization of Lead-free solders.
Current Projects :- Analysis of Lead-free solders for Electronic devices.
- Shear/tensile/vibration testing of MOEMS and microfluidic devices.
- Reliability of fluxless soldering for hermetic packaging.
Title
- Solder ball with Cu pad with Cu-Sn intermetallic layers.
Micropackaging : Microfluidics
- Overview:
Modular microfluidic circuits & interconnections for multipurpose applications in life science, chemistry, BioMEMS, and Lab-on-Chip devices.Approach:
- Low cost flexible substrates using polymer molding.
- Embedded microvalves to measure fluid volume, direct flow and sequence discrete flow control.
- Reconfigurable circuit construction by assembly of modular components on a platform substrate.
Accomplishments:
- Fluidic interconnection using PDMS molded adapters.
- Pneumatic pressure controlled microvalves.
- Manipulation of discrete volume fluid using fluidic gates.
- Modular microfluidic platform design, fabrication, and integration.
- An assembled flexible microfluidic circuit
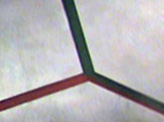
- Y-shape channel for laminar flow mixer

- DMS adapter for microfluidics.
Fabrication : Femtosecond Laser Machining
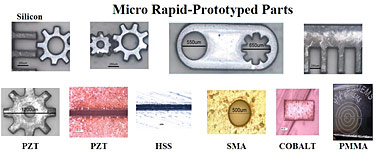
- Fabrication capabilities at ARRI include access to a
Hurricane Femtosecond Ti:sapphire Laser by Spectra Physics for the
micromachining of small parts. This rapid prototyping system can produce
parts in as little as 20 to 30 minutes and is one of few available in
academia and industry in the US for machining & manufacturing.
The revolutionary advances made in the field of semiconductors, information technology, biotechnology and medicine have led to an increased need for better and faster microfabrication technologies. In this respect, laser based micromachining is gaining recognition due to its numerous advantages over traditional microfabrication processes.
- Fabrication capabilities at ARRI include access to a
Hurricane Femtosecond Ti:sapphire Laser by Spectra Physics for the
micromachining of small parts. This rapid prototyping system can produce
parts in as little as 20 to 30 minutes and is one of few available in
academia and industry in the US for machining & manufacturing.
Fabrication : PiezoMEMS
- Overview:
- Develop piezoelectric devices using MEMS technology and targeting applications to sensors, actuators, and power generators.
- Develop piezoelectric materials and deposition processes compatible with flexible substrates.
- ARRI MEMS software design and simulation tools include Intellisuite's Piezo MEMS library.
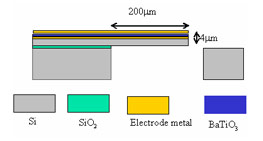
Cross Section of Piezo MEMS microcantilever beam
Approach:- Sol-gel process for deposition of BaTiO3 and Pb(Zr,Ti)O3 thin films.
- Novel lithography and etching techniques to realize complex structures.
- Combination of heterogeneous materials on the same substrate.
Process flow for depositing BT thin films.
Health Monitoring: Prognostics & Diagnostics
- Objective:
- Develop improved methods for intelligent automated Diagnostics and Prognostics for engineered machinery, aerospace, and vehicle systems
- Provide a unified and rigorous framework for computer-aided Condition-Based Maintenance (CBM) and Prognostics & Health Management (PHM) based on wireless sensor networks
Control : Intelligent & Nonlinear Control
- Overview:
Develop improved control systems for modern high performance systems in aerospace, robotics, unmanned vehicles, automotive systems, microdevices, compute hard disk drives, and elsewhere, which are becoming more complex. Performance requirements for these systems are becoming more rigorous in terms of speed of response and precision of motion.
Approach:- Use biologically inspired control system structures based on neural networks, decision-making, and linguistic fuzzy logic to avoid the need for exact system descriptions, to avoid full internal state measurements, and to deal with incomplete knowledge of disturbances.
- Formal derivation of digital control system structures with learning features for implementation on computer microcontroller systems.
- Feedback Linearization that allows the control of systems with high-frequency flexible modes such as vehicle suspension vibration, fuel slosh, tank gun barrel vibration, aircraft flutter, computer disk drive oscillations and windage. Neural networks allow learning of unknown effects.
- Dynamic Inversion with a neural network learning feature for effective compensation of actuator deadzones, uncertainties, and disturbances.
- Nonlinear Lyapunov proof extension methods to determine control system structure and neural network learning schemes that guarantee closed-loop performance of intelligent controllers in the presence of uncertainties and disturbances.
- High-level performance critic methods for updating control system parameters through real-time learning techniques.
- Backstepping methods using Neural Networks to learn unknown dynamics. This allows effective control of coupled systems with more degrees of freedom than control inputs by using the system structure properties.
- Adaptive Fuzzy Logic methods to allow dynamic focusing of controller awareness on regions where more performance activity is needed.
- Actuator feedforward compensation controllers that incorporate neural network or fuzzy logic components to offset the effects of unknown backlash, deadzone, and friction.
- Nearly optimal control design using solution of nonlinear controller design equations using neural network approximators.
- Development of robust output-feedback learning controllers that
operate effectively with reduced measurement information about the
system state.
Accomplishments: - New learning control systems have been developed, simulated on computers, and implemented on DoD, vehicle, and industry platforms. These systems significantly improve the performance and control of modern high-performance systems.
- Development of high performance nonlinear control system for MEMS optical switch.
Control : Discrete Event Control
- Objective:
- Develop improved supervisory control systems for event-based systems including manufacturing workcells, wireless sensor networks, battlefield command and communication, and dynamic resource assignment.
- Provide a rigorous and streamlined framework for mission planning, task sequencing, and real-time resource assignment that allows analysis of performance, computer simulation & verification, and fast implementation of effective supervisory controllers on actual task/resource systems.
Approach:
- Discrete event controller based on matrices for efficient design, computer simulation, and implementation.
- Matrix Graphical User Interface for ease of mission programming and resource assignment.
- Incorporation of the Steward Task Sequencing matrix and the Resource Requirements matrix into a rigorous mathematical framework to calculate the next jobs to perform and assign the required resources dynamically.
- Measurement of events, sensor readings, available resources, and tasks accomplished in the discrete event system, and formal computation of the next activities needed using a simplified feedback controller structure.
- Analysis to determine the onset of blocking phenomena such as deadlock and throughput delay, and computation of blocking avoidance tactics.
- Relation of our Matrix Feedback Controller with standard tools such as Petri Nets and Max-Plus Algebra, which are more difficult to implement on actual systems but have a good theoretical foundation.
- Implementation of Graphical User Interfaces in LabVIEW for easy design for discrete event systems, including mission planning, task sequencing, and resource pool assignment.
- A higher-level outer loop for priority task assignment, Quality of Service, and User Selected dispatching.
- Programming of manufacturing workcells and wireless sensor networks remotely over the internet.
Accomplishments:
- A new Matrix Framework has been developed for discrete event supervisory control, including task assignment and dynamic resource assignment.
- The matrix framework allowed development of a new supervisory controller that allows fast design, mission planning, computer simulation, and actual implementation.
- A US patent has been received.
- Publication of a book on Discrete Event Control and numerous scientific papers.
- NSF grant received for work with Mexico universities to program robot workcells over the internet using the new controller.
- Two Army Research Office contracts received, one for research in discrete event control, and one DURIP to buy equipment for a Wireless Sensor Networks Lab at ARRI.
- With our method, it is now as easy to deploy and program a wireless sensor network as it is to program a PC.
- A wireless sensor network has been developed for Condition-Based Maintenance of a machinery room, including equipment monitoring, fault diagnosis, and health prognosis using advanced decision schemes.
- Implementation of our DE controller on a robotic manufacturing workcell at ARRI.
- Implementation of our DE controller on a wireless sensor network for environmental monitoring and area security at ARRI.
- International collaboration with leading researchers and institutes in Europe and China
- Development of an ARRI Outreach program including local high school Teacher Development, and summer programs for top local students
- Founded local Dallas/Fort Worth IEEE Control systems Society Chapter in 1994