|

4
 |
 |
| M4 |
|
 |
United Kingdom |
University of Reading |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Navigation |
 |
|
|
|
Offer Profile
Welcome to the CIRG, part of the School of Systems Engineering at the
University of Reading which cooperates closely with the School of
Pharmacy on projects concerned with Cybernetic Intelligence and
interfaces between nervous system and machines. Cybernetic intelligence is the study of intelligence and its
application. It is an approach characterised by its emphasis on sub-symbolic
know-ledge representation and bottom-up (ie. data driven) problem solving.
Cybernetic intelligence describes theoretical, mathematical and philosophical
aspects of consciousness and intelligence and their application to the design of
intelligent machines and the control of complex systems.
|
|
|
|
Product Line Up
|
Man Machine Interfaces
Project Cyborg
The US Professor and visionary, Norbert Wiener,
founded the field of Cybernetics in the 1940's. He envisaged that one day
electronic systems he called "Nervous Prostheses" would be developed that
would allow those with spinal injuries to control their paralysed limbs
using signals detected in their brain
In the UK two internationally renowned professors, in the School of Systems
Engineering at the University of Reading, Brian Andrews and Kevin Warwick
together with the eminent neurosurgeon Peter Teddy have just taken a step
closer to this dream. The team have come together from different branches of
Cybernetics and Neurosurgery. Professor Warwick specializes in the field of
Artificial Intelligence and Robotics and Brian Andrews in the field of
Biomedical Engineering, Neural Prostheses and Spinal Injuries. Peter Teddy
has a long involvement with neural implants and is the head of Neurosurgery
at Oxford. Although seemingly worlds apart, these fields have many common
threads.
The principal investigators Andrews, Warwick and Teddy, lead a large team of
surgeons and researchers including, Brian Gardner, Ali Jamous, Amjad Shad
and Mark Gasson of the world famous National Spinal Injuries Centre
(NSIC)-Stoke Mandeville Hospital, the Radcliffe Infirmary in Oxford and the
University of Reading, UK. The team are supported by the David Tolkien
Trust, Computer Associates, Tumbleweed and Fujitsu.
A sophisticated new microelectronic implant has been developed that allows
two-way connection to the nervous system. In one direction, the natural
activity of nerves are detected and in the other, nerves can be activated by
applied electrical pulses. It is envisaged that such neural connections may,
in the future, help people with spinal cord injury or limb amputation.

|
|
|
|
Department of Cybernetics Robots
|
 |
Cybernetic Implant 1 (1998)
|
|
Cybernetic Implant 1 (1998)
|
|
|
|
|
Cybernetic Implant 2 (2002)
|
|
Cybernetic Implant 2 (2002)
Professor Kevin Warwick
|
|
The next step towards true Cyborgs?
|
|
|
© Photos not for reproduction without permission of the CIRG |
|
|
|
The Neurally Controlled Robot Project -
Animat
Our research group is interested in the study of
dissociated cultured neurone interactions, and how their network-level
interactions may play a role in low-level formation of memory and learning
mechanisms. There is strong evidence in research showing that neurones
exhibit an intrinsic networking capability which allows basic organisational
behaviours to emerge in random networks to some extent, even without the
structured spatial organisation naturally existing in-vivo.
Recent multi-Electrode-Array (MEA) technologies allow the recording and
stimulation of such neuronal cultures at multiple sites.
Our goal is to harness this computational power and map the input/output
sites of culture recordings to mobile robot embodiments, with an aim to
introduce learning by attempting to solve basic tasks such as object
avoidance and maze navigation.
The Animat Project
In a ground-breaking project at the School of Systems Engineering, members
of CIRG are interfacing computers with growing cultures of neurons via
electrode arrays, with the aim of having the cultures learn to control
mobile robots. This could result in an enormous step forward in
understanding the function and developmental process of neurons and neuronal
networks, and contribute to our understanding of biological mechanisms
underpinning such fundamental properties as memory or learning. Animat could
also constitute a viable and ethically more acceptable platform for
investigation of neural diseases, such as Alzheimer’s Disease or Parkinson’s
Disease, and ultimately could be used for testing new pharmacological
treatments. This exciting project opens up as well almost endless
possibilities for intelligent robotics platforms and may lead to creation of
truly autonomous robots that could be deployed in conditions that precludes
frequent human intervention, e.g. for deep space exploration.
Architecture for Neuronal Cell Control of a Mobile Robot
It is usually expected that the intelligent
controlling mechanism of a robot is a computer system. Research is however
now ongoing in which biological neural networks are being cultured and
trained to act as the brain of an interactive real world robot – thereby
either completely replacing or operating in a cooperative fashion with a
computer system. Studying such neural systems can give a distinct insight
into biological neural structures and therefore such research has immediate
medical implications. In particular, the use of rodent primary dissociated
cultured neuronal networks for the control of mobile ‘animats’
(artificial animals, a contraction of animal and materials) is a novel
approach to discovering the computational capabilities of networks of
biological neurones. A dissociated culture of this nature requires
appropriate embodiment in some form, to enable appropriate development in a
controlled environment within which appropriate stimuli may be received via
sensory data but ultimate influence over motor actions retained. The
principal aims of the present research are to assess the computational and
learning capacity of dissociated cultured neuronal networks with a view to
advancing network level processing of artificial neural networks. This has
been approached by the creation of an artificial hybrid system (animat)
involving closed loop control of a mobile robot by a dissociated culture of
rat neurons. This 'closed loop' interaction with the environment through
both sensing and effecting enables investigation of its learning capacity.
Source:
D. Xydas, D. Norcott, K. Warwick, B. Whalley, S. Nasuto, V. Becerra, M. Hammond,
J. Downes, and S. Marshall, “Architecture for Neuronal Cell Control of a Mobile
Robot”, Springer Tracts in Advanced Robotics - Proceedings of European Robotics
Symposium 2008, vol. 44, pp. 23-31, 2008.
|
|
|
|
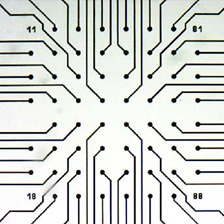
Typical glass MEA, showing large contact pads which lead
to the electrode
column – row arrangement
|
|
Electrode arrays in the centre of the MEA, as typically
seen
under an optical microscope,
|
|
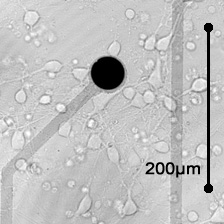
Single electrode close-up, showing a number of neuronal
cells
in close proximity along with a vast number of neural connections between
them.
|
|
|
|
|
|
|
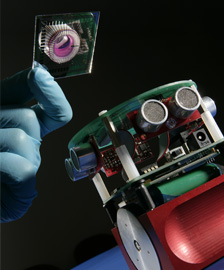
Miabot Pro with 8-way sonar array pack
|
|
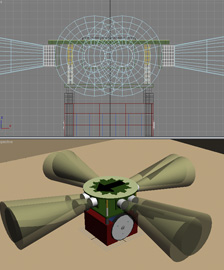
Virtual animat designed using
mainly basic geometrical primitive shapes and exported as VRML file
|
|
|
|
|
Embodied Machine Intelligence
The group has witnessed considerable success in the
field of autonomous intelligent robotics. The group's interactive robots are
on permanent exhibition in the Science Museums in London, Birmingham and
Linz.
This research has been documented in major texts surveying the field (it is
the only UK entry in MIT's RoboSapiens), and has also received high profile
international media exposure on numerous television documentaries shown by
BBC and the Discovery Channel, amongst many others.
In partnership with Eaglemoss Publishing Ltd, the group developed the Cybot,
a robot kit as part of a magazine 'Real Robots', resulting in royalties from
national and international sales in excess of £1.2m for the University of
Reading. Over 50% of these funds are channelled back into post doctoral
research assistantships and postgraduate studentships.
|
|
|
|
|
 |
Humanoid Robot Tournament
The first ‘Androids Advance!’ humanoid robot tournament
was launched as a pilot study to assess the format and infrastructure as
such a public engagement tool, and to raise awareness of a proposed
subsequent nationwide tournament. The pilot involved sixteen teams from
schools in London and the Southeast of England. Each team had to 'program
and upgrade' a biped robot in order to successfully compete in a series of
disciplines. This culminated in a live tournament day held at the Science
Museum in London. The Androids Advance Challenge proved to be a great
success with schools, the public and all those involved in its organisation,
by delivering a high impact event to a very wide audience.
|
|
|
|
Intelligent Control
The group's developments in intelligent control have
been applied to optimize spacecraft trajectories and to find invariant
relative satellite motion with funding from the European Space Agency.
There is considerable work within the group on data-based modelling for a
priori unknown nonlinear systems. Novel algorithms have been developed for
various types of applications, e.g. control, signal processing, pattern
recognition and communications. Examples of our research include system
identification of nonlinear time series/dynamical systems with heterogeneous
noise, new kernel classifier construction algorithms for imbalanced data
sets, sparse probability density estimators for pattern recognition, and
data detection and phase noise cancellation for OFDM wireless communication
systems.
Recently completed work includes: the development of ef ficient fuzzy
controllers which map linear control laws for small signals, but which
exhibit much greater robustness than their linear counterparts; the
development of methods for feedback linearisation using dynamic neural
networks; and an investigation on the use of optic flow and CMAC networks
for robot balancing.
The group has extensive laboratory equipment where real time control
experiments are performed. The equipment includes various robot
manipulators, mobile robots, a 3D crane system, mobile robots, single and
double inverted pendulums, a magnetic bearings device, as well as
state-of-the-art data acquisition equipment, and real-time control software.
|
|
|
|
|
|
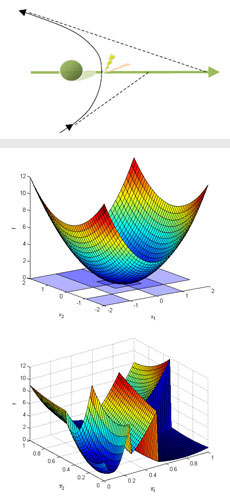
Gravity Assist Space Pruning (GASP)
This work, which has received funding from the European Space Agency,
focuses on the problem of optimisation of spacecraft trajectories with
multiple gravity assists. A gravity assist occurs when a space probe
performs a swing-by of a planet, effectively stealing some of the planet's
momentum to gain velocity (of course, the amount that the planet is slowed
down by is negligible!). Performing one or more gravity assists allows the
probe to require less fuel and to reach further distances
A multiple gravity assist (MGA) mission is where swing-bys are performed of
several planets in a row. For example, the recent Cassini-Huygens mission
reached Saturn by the swingby sequence
Earth-Venus-Venus-Earth-Jupiter-Saturn.
Due to the fact that all the planets are moving simultaneously in relation
to each other, the search space of a MGA mission has a huge number of local
minima, meaning that traditional optimisation techniques have trouble
finding good solutions. The key observation behind GASP was that the vast
majority of this space can be shown to be of very poor quality, requiring
unfeasibly large thrusts during the mission. Instead, by studying each phase
of the mission separately, such infeasible regions could be identified and
pruned from the problem, leaving a much reduced space that could then be
optimised much more effectively. The original GASP technique performs the
pruning based on an efficient sequential two-dimensional grid sampling. The
technique is also highly computationally efficient as its complexity is
polynomial in both time and space.
|
|
|
|
|
|
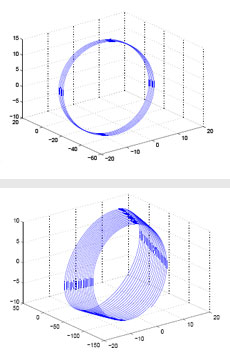
Invariant Relative Satellite Motion
This recent project, which received funding from the European Space Agency,
employed a Hamiltonian formulation of relative satellite motion and a
variant of Newton's method to locate periodic or quasi-periodic relative
satellite motion. The perturbations considered in the model included
nonlinear gravitational effects, the oblateness of the Earth (J2 effect) and
eccentricity of the reference orbit. Advantages of using Newton's method
includes simplicity of implementation, repeatability of solutions due to its
non-random nature, and fast convergence. In order to evaluate the effect of
the quality of the model used to generate the periodic reference trajectory,
a study involving closed loop control of a simulated chief/deputy satellite
formation was performed. See ESA final report for more details.
|
|
|
|
Neural Networks
Neural networks, or artificial neural networks, are
mathematical structures consisting of interconnected processing units which
can be trained to reproduce complex input-output patterns.
Reseach on the development and applications neural networks carried out at
CIRG is closely interleaved with the other sub-topics, particulary with
intelligent control, embodied machine intelligence, and computational
neuroscience.
In particular, recent work has been carried out on the development and
analysis of dynamic neural networks, which are neural networks which can be
described as nonlinear dynamical systems, on evolving neural network
structures, and on the development of the plastic self-organising map (see
figure).
|
|
|
|
Intelligent Search
Stochastic Diffusion Search (SDS) is a
population-based, pattern-matching algorithms. It belongs to the family of
swarm Intelligence and naturally inspired search and optimisation algorithms
which includes Ant Colony Optimization, Particle Swarm Optimization and
Genetic Algorithms. Unlike stigmergetic communication employed in Ant Colony
Optimization, which is based on modification of the physical properties of a
simulated environment, SDS uses a form of direct (one-to-one) communication
between the agents similar to the tandem calling mechanism employed by one
species of ants, Leptothorax acervorum.
In SDS agents perform cheap, partial evaluations of a hypothesis (a
candidate solution to the search problem). They then share information about
hypotheses (diffusion of information) through direct one-to-one
communication. As a result of the diffusion mechanism, high-quality
solutions can be identified from clusters of agents with the same
hypothesis.
Research carried out by CIRG members on Stochastic Diffusion Search (SDS)
has led to a comprehensive theoretical characterisation of SDS, which is so
far one of few SI algorithms with proven global convergence and
characterisation of its resource allocation capacity. Further research is
ongoing in collaboration with the Goldsmiths College, London, on extensions
of SDS and applications as a powerful self organising computing resources
management framework.
|
|
|
|
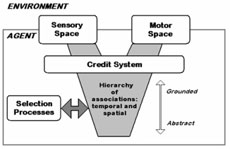
Applied Cognitive Systems
"Cognitive systems are natural or artificial
information processing systems, including those responsible for perception,
learning, reasoning and decision-making and for communication and action"
(DTI Foresight initiative). This definition facilitated the conclusion that
current artificial systems/robots are poor cognitive systems. A need was
identified to improve devices that we use every day, including assistive
technologies and to generate medical benefits. Our research aims to create
flexible, robust and adaptive applied cognitive systems. There is much
overlap and mutual benefit in the themes of CIRG, with a strong link to
embodied machine intelligence here. ACS interacts with an environment,
including virtual domains, seeking performance improvement through analogies
with human/animal behaviours. EMI interacts with a physical environment and
seeks performance improvements through any appropriate method. A common
thread is the utilisation of Cybernetic feedback where interaction with the
environment improves performance. Cognitive Systems research has been a
pillar of Cybernetics since the coalescence of the research area in the 50s.
|
|
|
|
|
|
Learning
Genetics-Based Machine Learning is a family of
optimisation techniques inspired by evolution that improve on a population
of initially random solutions by selecting the most promising solutions and
repeatedly "breeding" new solutions from them. As the generations progress,
the population moves towards the best solution to a problem.
Learning Classifier Systems (LCS) are a population-based evolutionary
technique, but rather than the genome representing a vector of numbers, it
instead codes for a set of rules. Using such biologically-inspired
methodology, members of CIRG have applied novel variants of LCS to solve
problems from steel mill quality control (see the figure below), to
multiplexing to robotic vacuum cleaner path planning, showing improvements
over other existing methods.
|
|
|
|
|
|
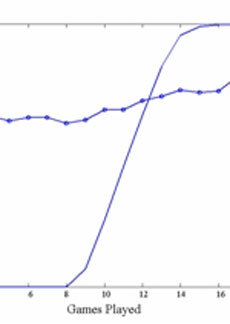
Abstraction
The need for abstraction arose from the data-mining of
rules in the steel industry through application of the genetics-based
machine learning technique of Learning Classifier Systems, which utilise a
Q-learning type update for reinforcement learning. It was noted that many
rules had similar patterns. For example, there were many rules of the type
'if side guide setting < width, then poor quality product' due to different
product widths. This resulted in a rule-base that was unnecessarily hard to
interpret and slow to learn. The initial development of the abstraction
method was based on the known problem of Connect4 due to its vast search
space, temporal nature and available patterns. The novel Abstraction
algorithm developed successfully improved the domain performance as
higher-order abstracted rules replaced generalised state-action rules in a
complex multi-step problem. It is hoped that this algorithm will help to
fulfil the intended use of the LCS technique as a test bed for artificial
cognitive processes. The figure shows a graph of percentage base rules
versus abstracted rules (solid line) as training progresses (circle line).
|
|
|
|
|
|
Emotions
The importance of ‘emotions’ in control mechanisms for
autonomous agents has been demonstrated using real and virtual robotic
platforms. A novel agent architecture was developed to provide a foundation
for ‘emotion’-based control. Instead of mapping states to actions, the novel
system developed maps states to an analogue of emotions and then to states.
This provided a non-linear, temporal control strategy that was
non-deterministic and thus advantageous in tested exploratory domains. An
appropriate test platform was created allowing real and virtual agents to
coexist and allowed production of a number of emotional rules. The
emotion-based architecture is shown to provide a number of benefits over
conventional approaches, which include simpler behavioural programming and
improved performance on complex exploration tasks. The two figures below
show the results of conventional and emotional robot path planning.
|
|
|
|
|
|
Value system
Artificial cognitive systems have had success in single
objective, single domains where the worth of each action may be
evaluated/estimated. However, if the system needs in to choose between
multiple goals or select an action when the worth estimate is poor, e.g. due
to long chains between current state and eventual payoff, then a value
system will be required. There is current research interest in the game of
Othello as strategy learning benefits fro m its value system being updated
at each given state. Thus learning becomes a two-stage process; 1. learn the
values of moves at each state, 2. learn the optimum policy of moves through
the states.
|
|
|
|
|
|
Memory
It is proposed that a biologically non-implausible model
of working memory be created, incorporated into a general cognitive
architecture, and embodied into an artificial agent (simulated and embodied
in a real mobile robot), such that its interaction with a complex
environment may be tested. Biological cognitive agents (e.g. humans, rats
and other mammals) are located in the real world, so must act within it,
whilst being constrained by it.
|
|
|
|
Computational Neuroscience
Computational neuroscience relates to the modelling
and understanding of the brain using computers. As part of ongoing
investigations at CIRG we are investigating the brain from a number of
different perspectives, ranging from top down (EEG analysis) to bottom up
(single neuronal reconstruction). These research directions are interlinked
with efforts on the Human Computer Interfaces on one hand, and with research
on Machine Learning on the other. Electroencephalogram (EEG) Analysis
Measuring electrical potentials at various points on the scalp over time
allows inferences to be made about the sources of electrical activity in the
brain. Electroencephalogram (EEG) fluctuations due to synchronous patterns
of activity of large pools of neurons seem to contain useful information
about the state the brain in terms of the cognitive processing as well as
its state of health. Research in CIRG concentrated on novel techniques for
characterisation of synchrony patterns and their application towards earlier
diagnosis of memory impairment. Such research is of great interest as it
characterises fundamental cognitive process and also because of its
practical potential for early diagnosis of dementia. This research is
continued in collaboration with the School of Psychology and Applied
Linguistics at the University of Reading and with the University of
Magdeburg, Germany. New project in collaboration with the School of
Psychology and Applied Linguistics, building on the successes of EEG
analysis projects for BCI applications and in memory function, is
concentrating on characterisation of EEG characteristics of linguistic
processing without the need for averaging over multiple trials. This is
extremely important as the standard averaging approach may mask important
features of the information processing in the brain and is most certainly
suboptimal for diagnosing subjects with brain damage which almost by
definition is going to be subject specific. In collaboration with The
University of Uberlandia, Brazil, research into characterising the EEG-like
signals from the very early stages of the auditory tract may help the
practitioners in early diagnosis of hearing impairments or in diagnosing
tumours of the auditory tract. |
|
|
|
|
|
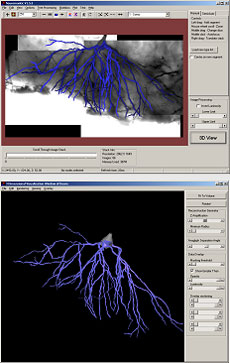
Neuronal Reconstruction
Members of the group has been involved with researching the reconstruction
of neurons from stacks of images obtained with a microscope. This is a
complex and time-consuming task, and significant progress has been made in
automating it through the development of the Neuromantic application, even
though the image data can be strongly visually ambiguous.
The 3D reconstructions created via such techniques are useful for several
reasons. Firstly, they can be used to help validate models of neuronal
behaviour by allowing comparison between results obtained via
electrophysiological testing and simulation. Secondly, comparing various
statistical measures of shape between control and experimental groups in a
biological trial can identify significant differences that could be
associated with neurological disease and lend insight into how they may be
treated/prevented.
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
6
|
|